Flujo de trabajo PPK completo para drones empresariales DJI
Instrucciones paso a paso para obtener resultados precisos con tu dron DJI Enterprise
La cinemática postprocesada (PPK) es un método de utilización de datos del Sistema Mundial de Navegación por Satélite (GNSS) para determinar con precisión la posición y la trayectoria de un rover/drone. La PPK consiste en recopilar datos GNSS sin procesar de un dron, junto con información sobre la posición y la trayectoria de estaciones de referencia cercanas, y procesar los datos a posteriori para mejorar la precisión de la información sobre la posición y la trayectoria.
La PPK se utiliza habitualmente en aplicaciones como la topografía, la cartografía y la agricultura de precisión, en las que el posicionamiento de alta precisión es fundamental. A diferencia del posicionamiento cinemático en tiempo real (RTK), que requiere una conexión inalámbrica en tiempo real con las estaciones de referencia, el PPK puede realizarse a posteriori, lo que permite una mayor flexibilidad en la recopilación de datos.
El postprocesamiento de los datos GNSS implica el uso de software especializado para procesar los datos brutos recogidos por el receptor y compararlos con los datos de estaciones de referencia cercanas para determinar la ubicación precisa del dron en un momento dado. Este proceso puede mejorar la precisión de la información de posición y trayectoria al corregir los errores introducidos por factores como las condiciones atmosféricas y las desviaciones de la órbita del satélite.
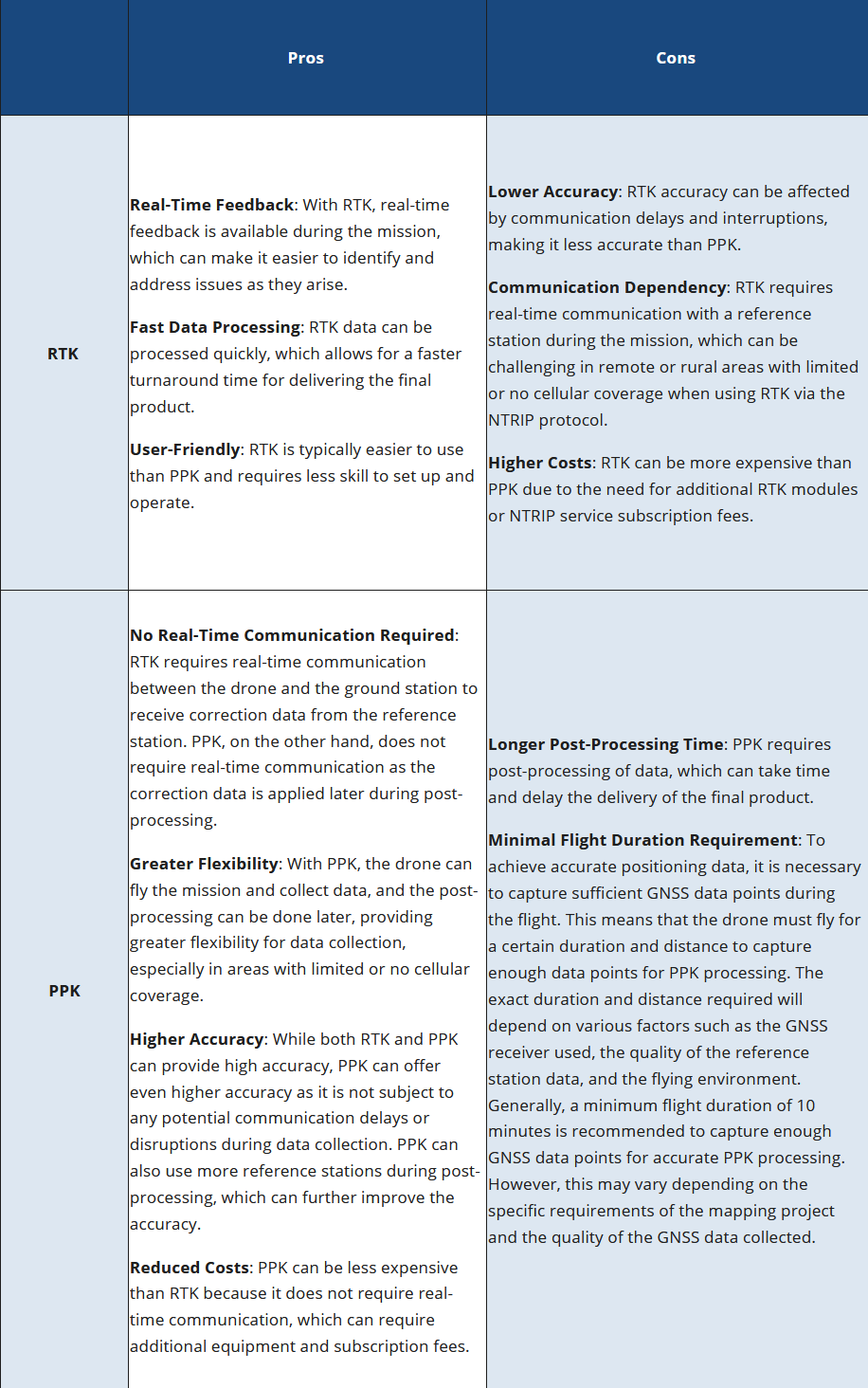
Aunque tanto el posicionamiento RTK como el PPK pueden utilizarse para aplicaciones cartográficas de drones, existen algunas ventajas de utilizar el PPK sobre el RTK:
La selección de PPK o RTK para un proyecto de cartografía depende en última instancia de requisitos específicos, como la flexibilidad, el coste y la escala de la misión. Aunque ambos métodos tienen sus ventajas e inconvenientes, los drones DJI Enterprise RTK siempre registran los datos de observación por satélite. Esto garantiza que incluso si un entorno celular inestable interrumpe la comunicación en tiempo real durante un vuelo RTK, el usuario puede recuperar los datos de la estación base y utilizar el método PPK como copia de seguridad para obtener datos precisos a nivel centimétrico.
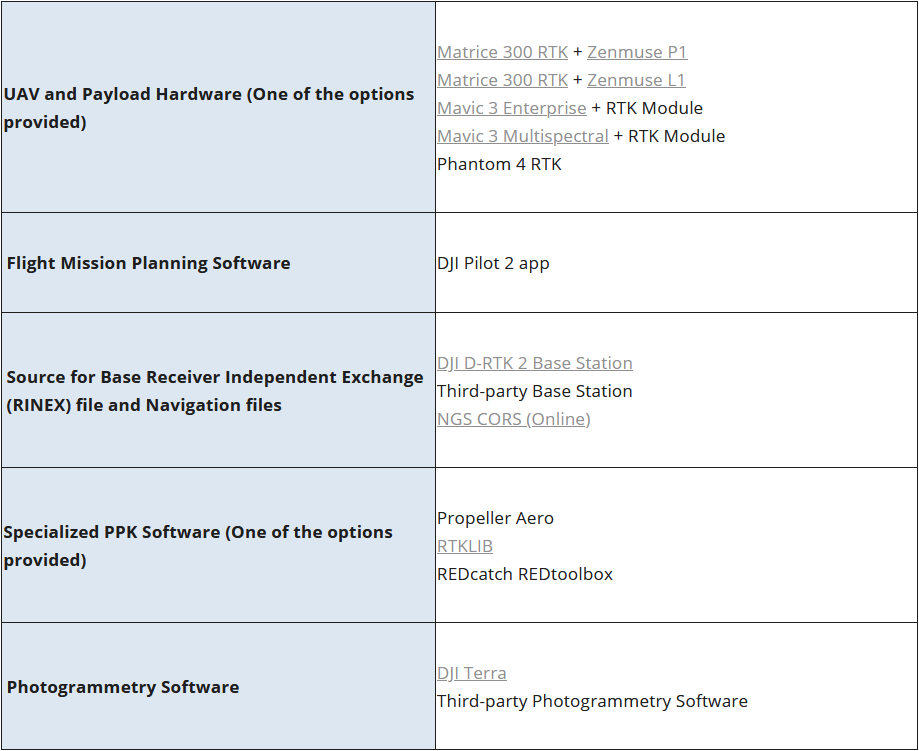
Preparación del hardware y software de PPK
Flujo de trabajo
Realizar un proceso PPK con datos de imágenes de drones puede parecer desalentador, pero en realidad es un proceso sencillo que requiere una planificación y ejecución cuidadosas. El proceso implica varios pasos clave, que se analizarán con más detalle en las instrucciones siguientes.
Ajustes y preparativos: Antes de empezar a recopilar datos del dron, tienes que planificar cuidadosamente la misión. Esto implica asegurarte de que la duración del vuelo es suficiente y de que algunos ajustes están activados en la aplicación DJI Pilot. Al planificar cuidadosamente la misión, puedes asegurarte de que recopilas suficientes datos para un procesamiento PPK preciso.
Recopilación de datos del dron: Una vez que hayas planificado la misión, es hora de recopilar los datos de imagen del dron y los datos GNSS correspondientes del receptor del dron durante el vuelo. Los datos GNSS deben incluir los datos brutos del sistema de navegación por satélite, así como la información de la marca de tiempo. Es importante recopilar tantos datos como sea posible para garantizar un procesamiento PPK preciso.
Recopilación de datos de referencia: Además de recopilar datos de drones, también debe recopilar datos de referencia de estaciones de referencia GNSS cercanas, como CORS u otros receptores terrestres. Los datos de referencia deben incluir las mismas señales GNSS e información de temporización que los datos GNSS del dron. Al recopilar datos de referencia, puede asegurarse de que sus resultados PPK sean lo más precisos posible.
Alineación de datos y procesamiento PPK: Una vez que haya recopilado todos los datos necesarios, deberá alinear los datos de imagen del dron con los datos GNSS correspondientes basándose en la información de temporización. Esto se puede hacer utilizando herramientas de software especializadas que pueden hacer coincidir la información de sincronización entre la captura de imágenes y el punto de datos GNSS. Tras alinear los datos, puede procesarlos utilizando software PPK especializado o servicios en línea. El procesamiento PPK utiliza los datos GNSS tanto del receptor del dron como de las estaciones de referencia para calcular la información de posicionamiento precisa para cada imagen capturada durante el vuelo.
Sobrescritura de datos POS: Asegúrese de que los nuevos datos POS se importan correctamente en el software de fotogrametría. Este paso es crítico porque la precisión de los modelos fotogramétricos depende en gran medida de la calidad de los datos de entrada. Por lo tanto, es necesario volver a comprobar la compatibilidad de los datos POS con el software y asegurarse de que se sobrescriben correctamente.
Aunque realizar un proceso PPK con datos de imágenes de drones puede parecer complejo, es un proceso necesario para obtener resultados cartográficos precisos. Si planifica cuidadosamente la misión, recopila suficientes datos y realiza comprobaciones de control de calidad, podrá asegurarse de que los resultados sean lo más precisos posible.
Ajustes y preparativos
Antes de volar tu dron, es importante configurar correctamente tu aplicación DJI Pilot 2. Aquí tienes algunos consejos para asegurar un vuelo exitoso:
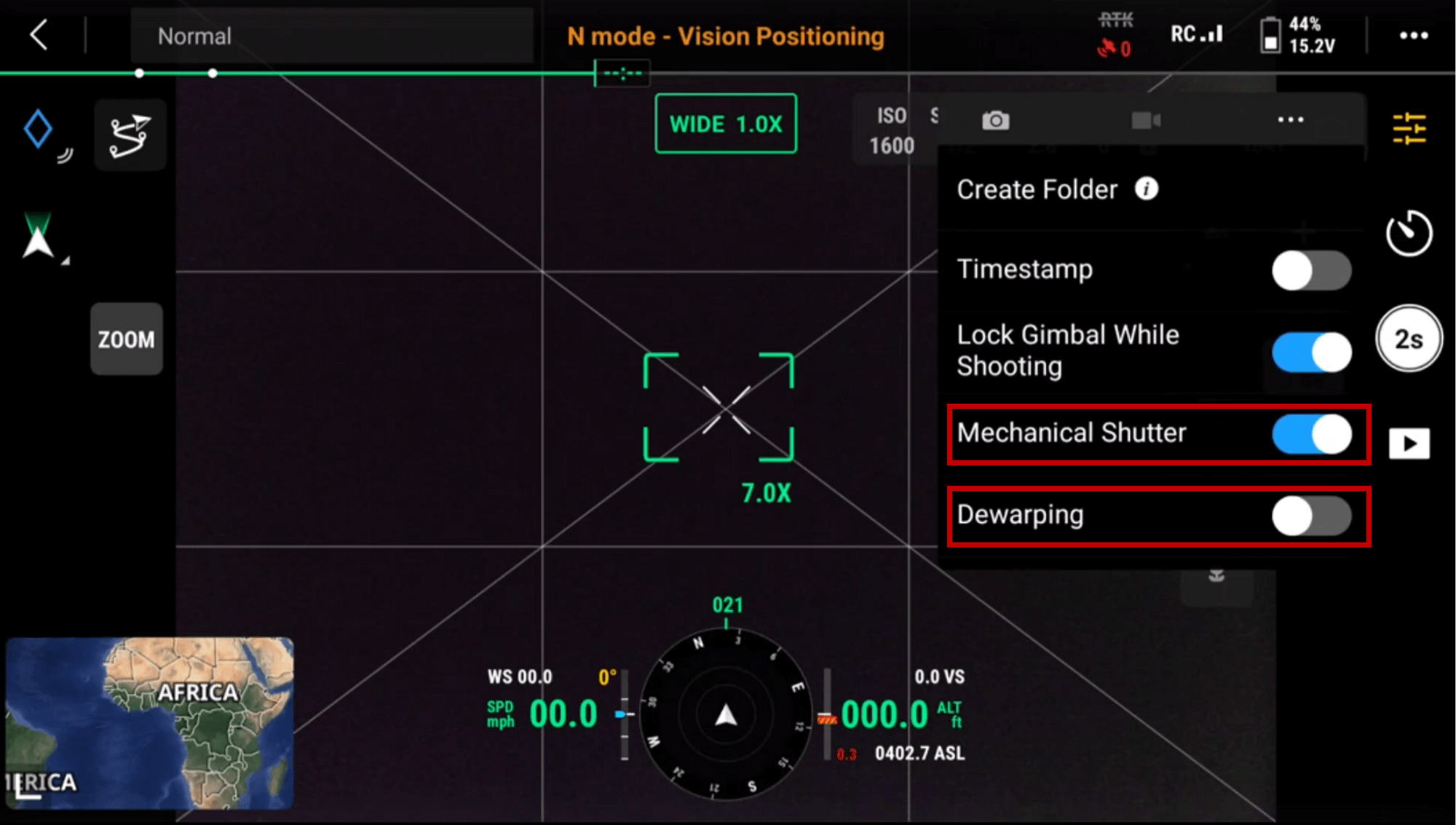
Active la opción "Obturador mecánico" y desactive la opción "Dewarping".
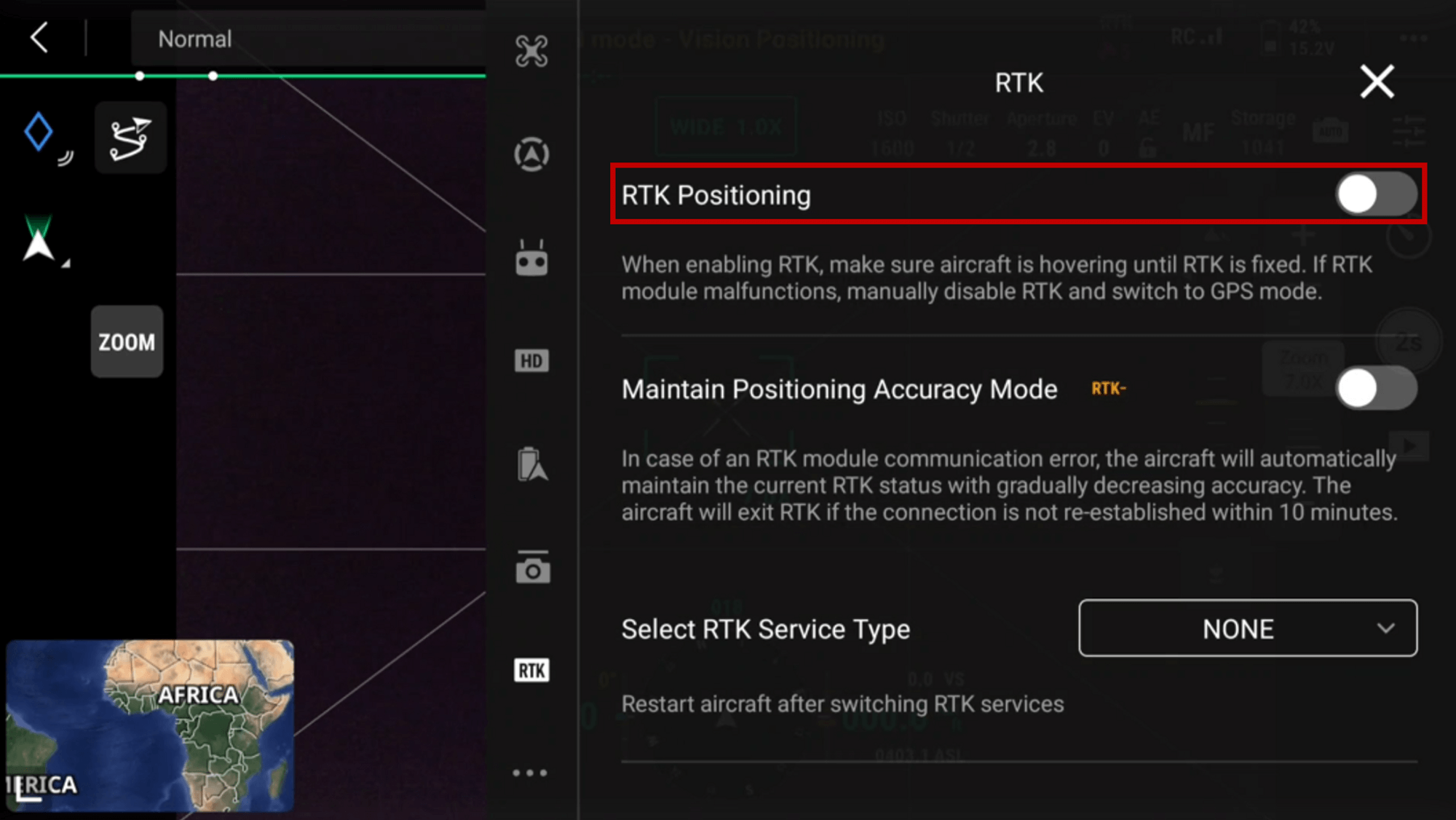
Asegúrese de que la opción RTK está desactivada en la configuración de la aplicación Pilot.
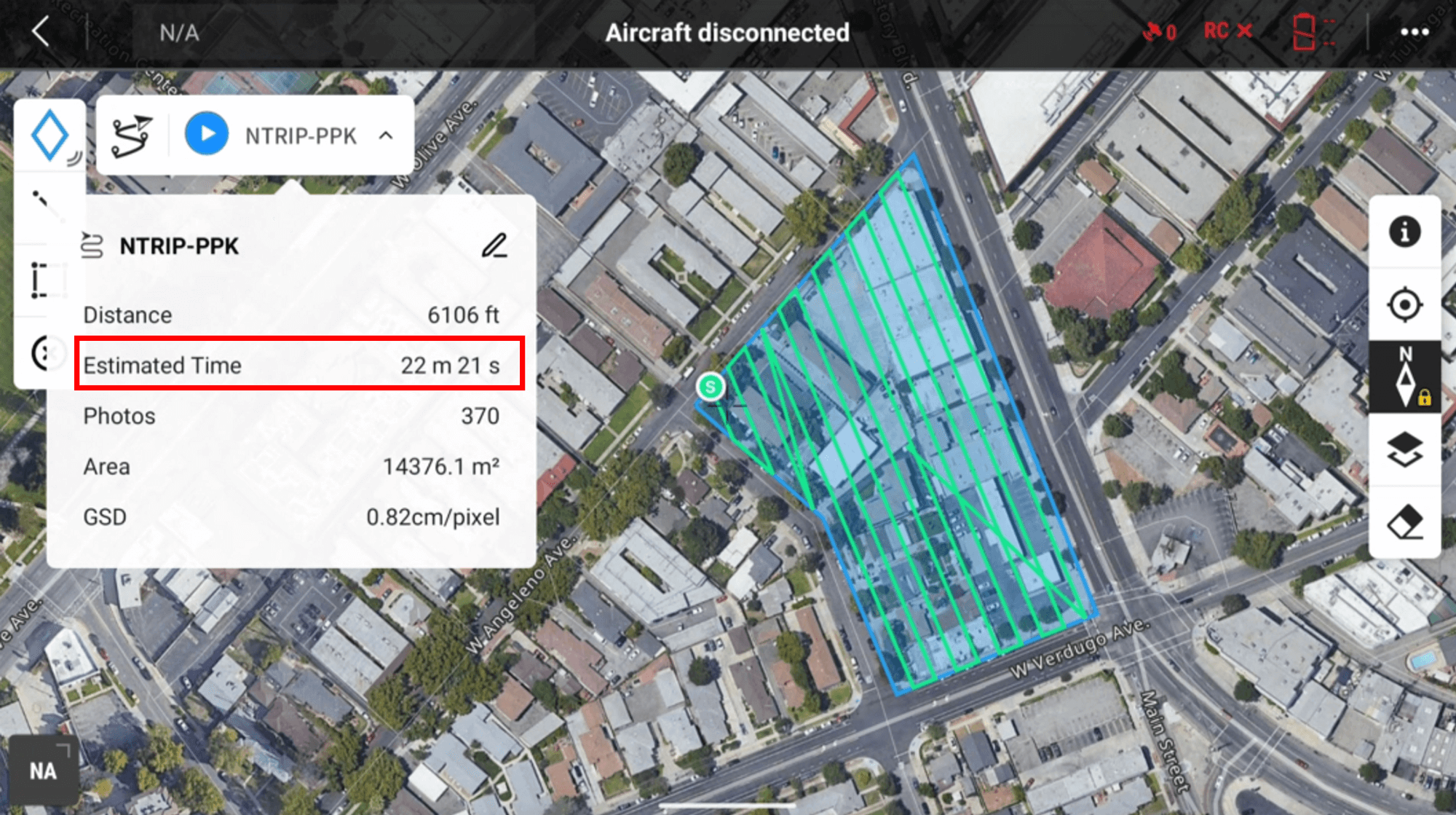
Es importante señalar que el proceso PPK requiere el postprocesamiento de los datos, lo que puede llevar tiempo y retrasar la entrega del producto final. Además, para lograr datos de posicionamiento precisos con PPK es necesario capturar suficientes puntos de datos GNSS durante el vuelo. La duración exacta y la distancia requerida dependerán de varios factores, como el receptor GNSS utilizado, la calidad de los datos de la estación de referencia y el entorno de vuelo. En general, se recomienda volar durante un mínimo de 10 minutos para capturar suficientes puntos de datos GNSS para un procesamiento PPK preciso. En la aplicación Pilot, puede comprobar el tiempo de vuelo estimado de la misión en la pestaña desplegable de resumen de la misión.
Recopilación de datos de drones
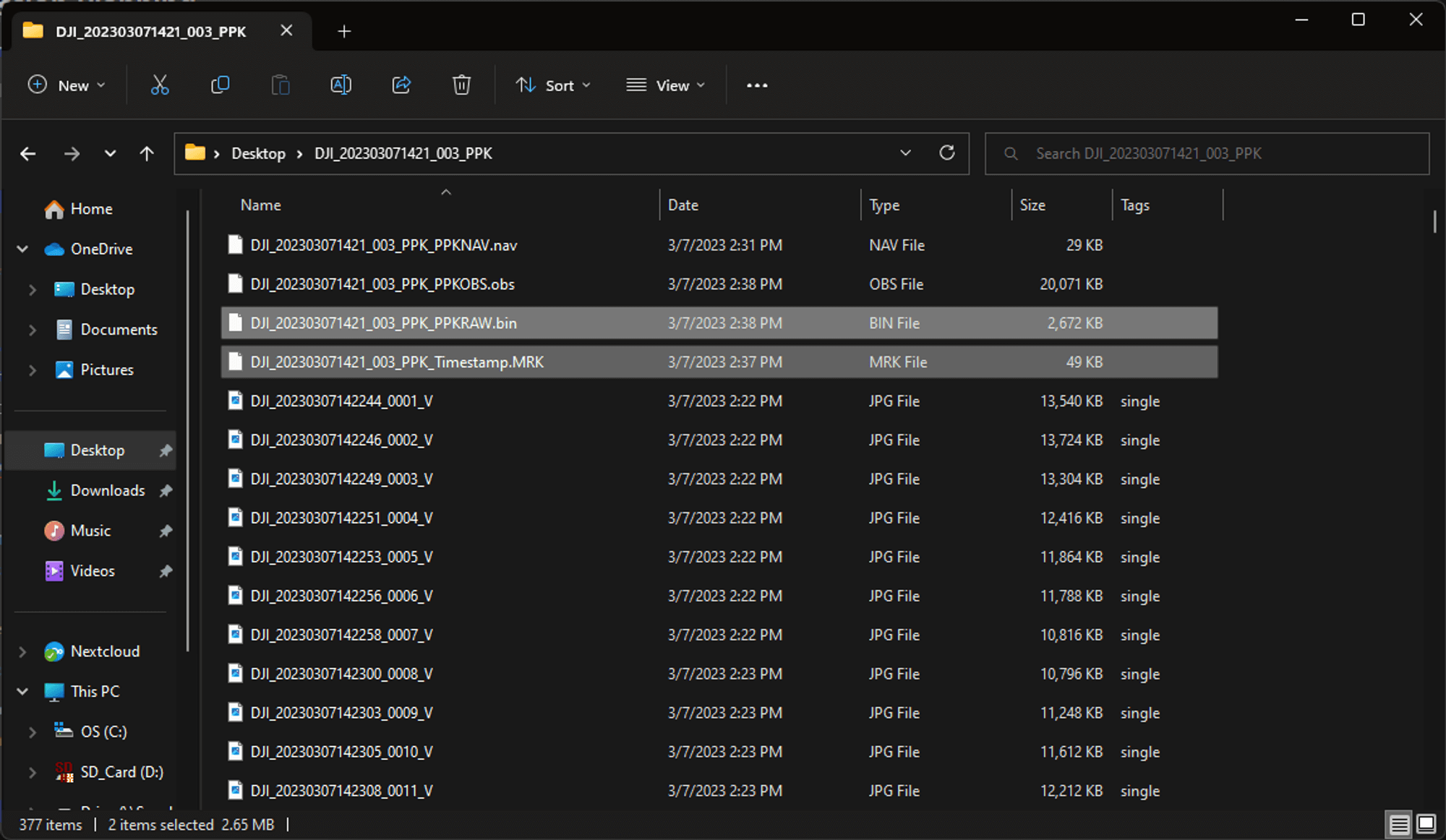
Para procesar correctamente con el método PPK, los datos del dron son esenciales. Además de las imágenes en bruto, se necesitan dos archivos adicionales de la carpeta de imágenes: el archivo de intercambio independiente del receptor (RINEX) del dron y el archivo de marca de tiempo de la imagen.
El archivo RINEX del dron contiene mediciones GPS sin procesar que son fundamentales para lograr un posicionamiento de alta precisión. Estos datos se utilizan para corregir errores en la señal GPS que pueden surgir debido a diversos factores, como las condiciones atmosféricas y la posición de los satélites GPS. Sin estos datos, la precisión del método PPK se vería gravemente comprometida. El archivo RINEX, denominado "XXX_PPKRAW.bin", se encuentra en la carpeta de fotos sin procesar.
Del mismo modo, el archivo de fecha y hora de la imagen es crucial para obtener resultados precisos. Este archivo registra la hora exacta en que se tomó cada imagen, lo que es necesario para sincronizar correctamente los datos de la imagen con las mediciones del GPS. Sin esta información, sería muy difícil alinear con precisión los datos de la imagen con los del GPS, lo que a su vez repercutiría negativamente en la precisión de los resultados finales. El archivo de fecha y hora, llamado "XXX_Timestamp.MRK", también se encuentra en la carpeta de fotos sin procesar.
Es esencial asegurarse de que estos archivos se recopilan y procesan correctamente para lograr la mayor precisión posible con el método PPK. Y solo unos pocos modelos de drones DJI Enterprise compatibles con RTK/PPK son capaces de generar estos archivos, incluidos:
Para realizar el procesamiento PPK (Post-Processed Kinematic) utilizando una estación base para los datos de referencia, normalmente se necesitan dos tipos de archivos relacionados con los datos GNSS (Sistema Global de Navegación por Satélite): un archivo RINEX base y un archivo de navegación:.
Archivo RINEX de base: Este archivo contiene los datos GNSS sin procesar recopilados por la estación base, normalmente en formato RINEX. El archivo RINEX base incluye mediciones precisas de señales de satélite, posiciones e información de temporización. El archivo suele recopilarse al mismo tiempo que el vuelo del dron o lo más cerca posible de la hora de vuelo. El archivo RINEX base se utiliza como referencia para corregir los datos GNSS sin procesar recogidos por el dron durante el vuelo.
Archivo de navegación: Este archivo contiene información sobre la posición y la órbita de los satélites GNSS utilizados para el proyecto de cartografía. El software PPK utiliza el archivo de navegación para calcular la información de posicionamiento precisa para cada imagen capturada durante el vuelo del dron. El archivo de navegación puede obtenerse de varias fuentes, incluidas agencias gubernamentales como el Servicio Geodésico Nacional de EE.UU. (NGS) o servicios en línea como el Servicio Internacional GNSS (IGS).
En esta sección de instrucciones, utilizaremos como ejemplo el NGS CORS para obtener estos archivos GNSS:
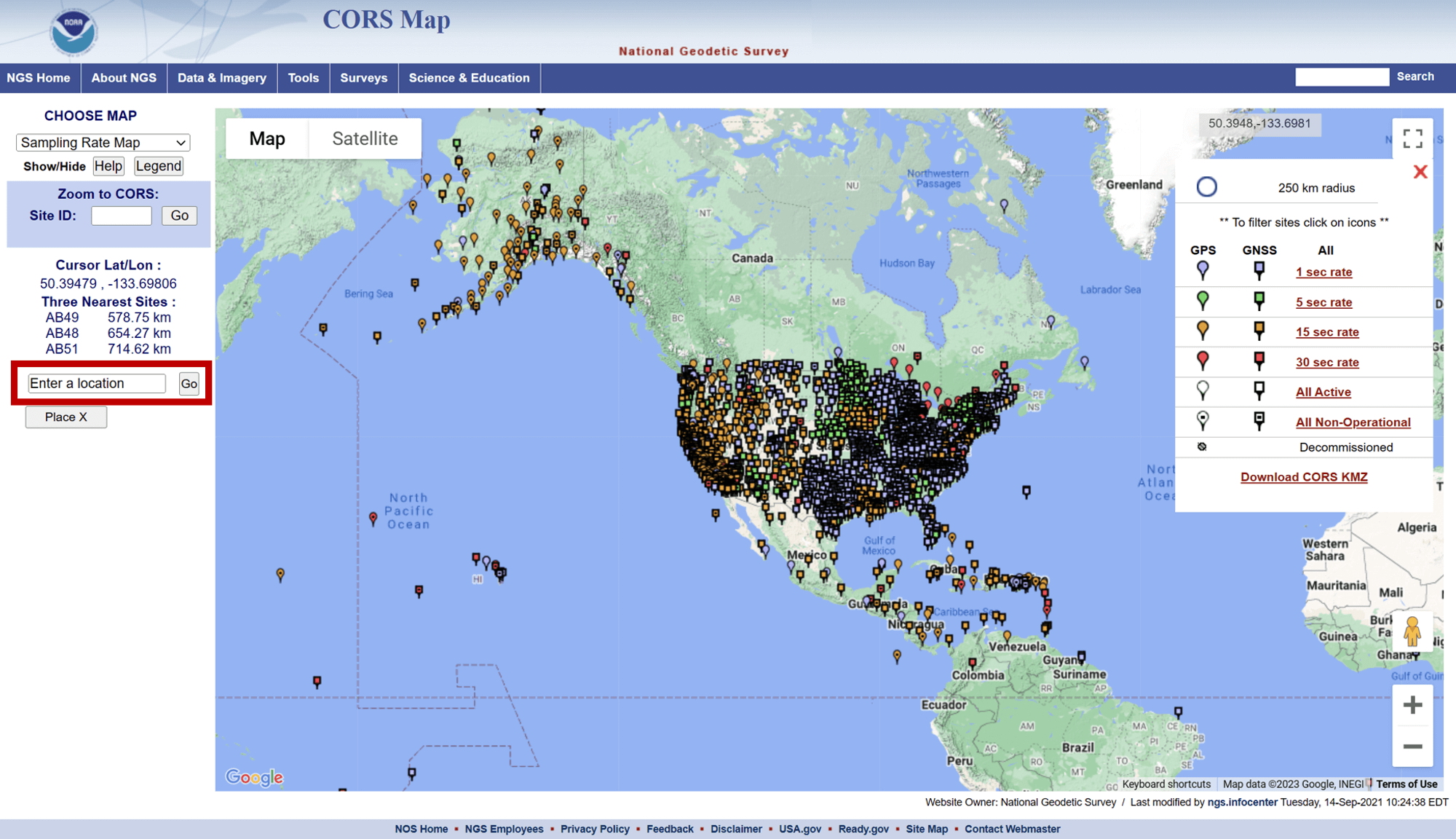
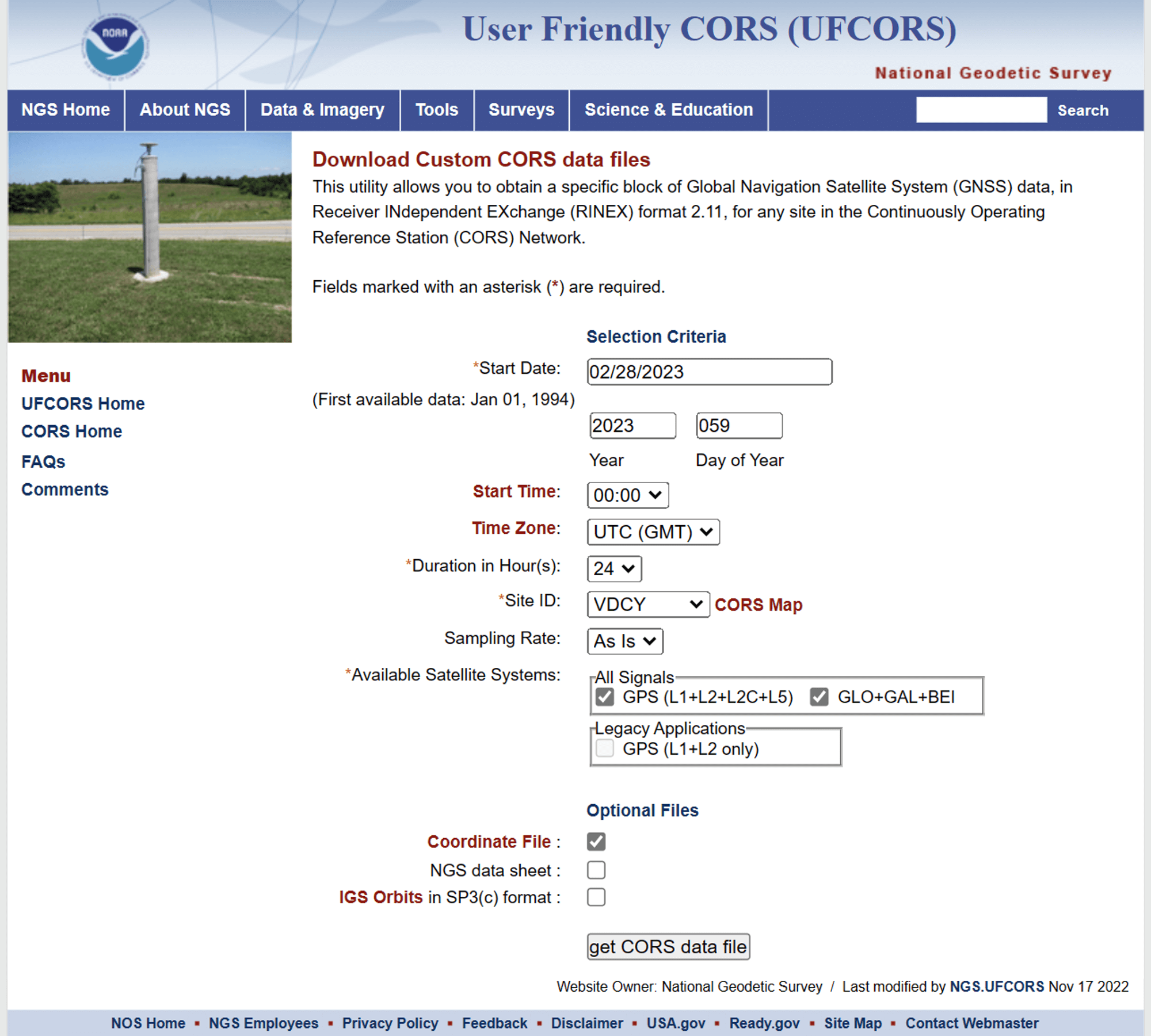
Para recopilar datos de referencia CORS utilizando el servicio UFCORS (User Friendly CORS) de la NOAA (National Oceanic and Atmospheric Administration), siga estos pasos:
Introduzca la dirección del vuelo del dron en el cuadro de búsqueda de la izquierda y seleccione Ir:
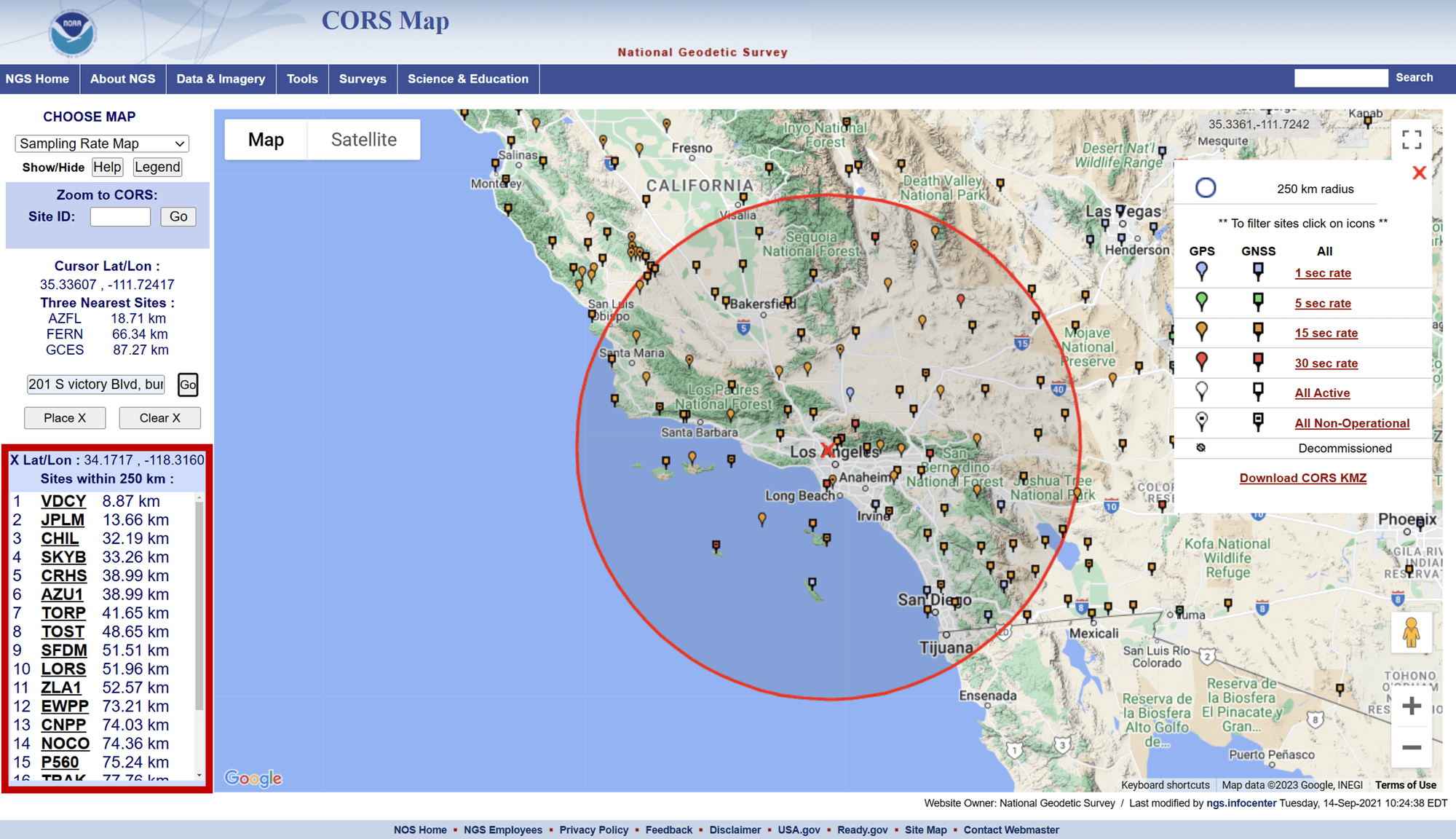
3. Seleccione un sitio con la línea de base más corta posible y registre el nombre del sitio. La línea de base se refiere a la distancia entre la estación de referencia GNSS y el dron. Una distancia de línea de base más corta generalmente produce resultados PPK de mayor precisión, ya que reduce el potencial de errores introducidos por las condiciones atmosféricas y otros factores ambientales. La distancia base entre el emplazamiento CORS y el dron puede afectar a la calidad de los datos de referencia utilizados para el proceso PPK. Una distancia de referencia más larga puede dar lugar a más errores debidos a factores atmosféricos y otros factores ambientales, lo que puede conducir a un resultado PPK menos preciso. Por lo tanto, se recomienda mantener la distancia de la línea de base lo más corta posible sin dejar de cubrir la zona cartográfica. No se recomienda utilizar sitios con una línea de base de más de 20 millas.
4. Vaya al sitio web de UFCORS y seleccione el intervalo de fechas de los datos que desea recuperar. Seleccione "obtener archivo de datos CORS" Los datos se descargarán como un archivo comprimido (por ejemplo, .zip). Es importante asegurarse de que los datos CORS se recogen al mismo tiempo que los datos de imagen del dron para garantizar un procesamiento PPK preciso. También debe evaluar cuidadosamente la calidad de los datos CORS para asegurarse de que cumplen las normas de precisión requeridas para el proyecto cartográfico. La planificación y ejecución adecuadas de la misión del dron y la recopilación de datos CORS son esenciales para garantizar un procesamiento PPK preciso y unos resultados cartográficos de alta calidad.
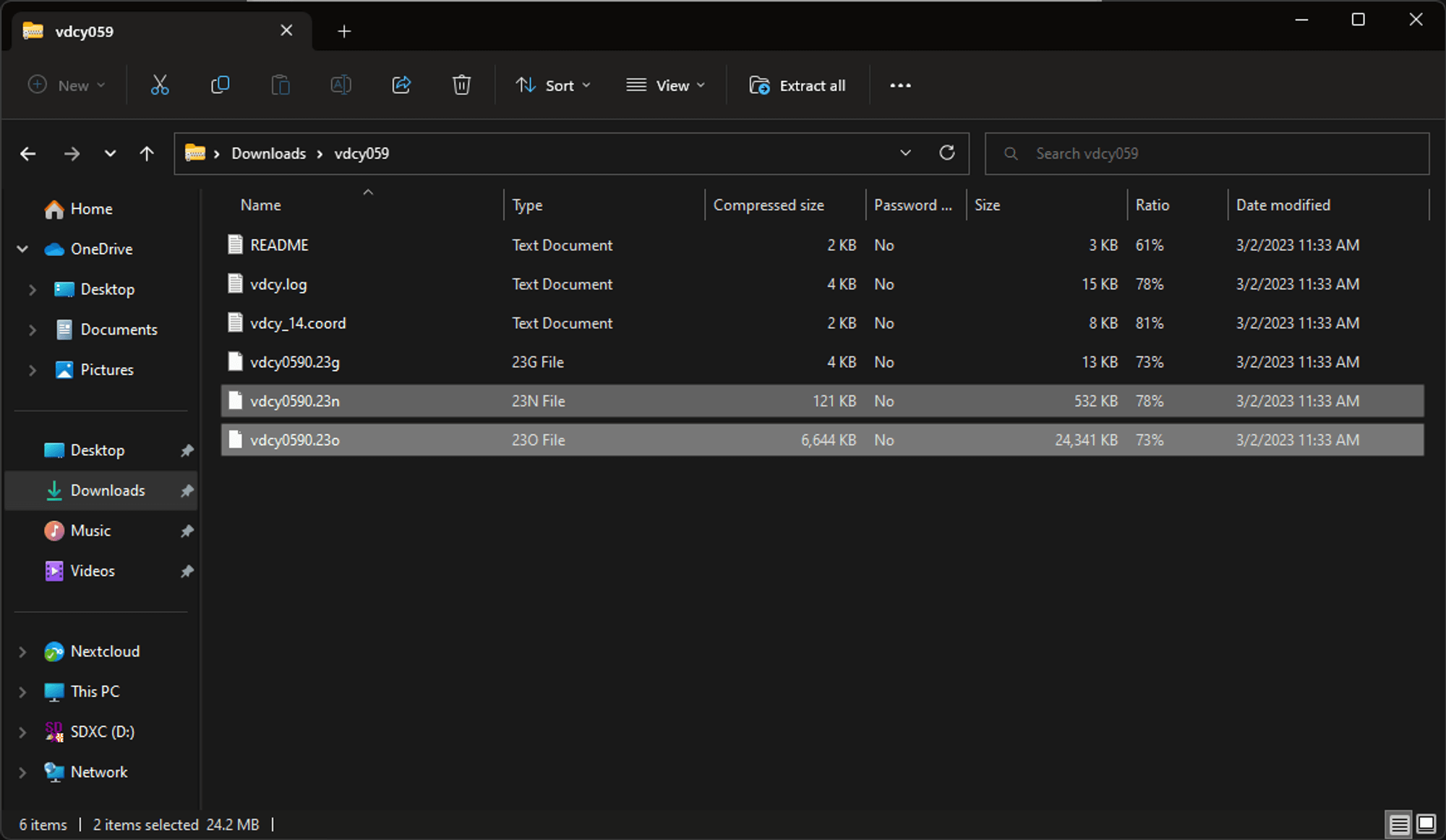
5. Abra el archivo zip descargado y asegúrese de que contiene los dos archivos siguientes: xxx.xxo (archivo RINEX base) y xxx.xxn (archivo de navegación).
Si no hay una estación base NGS CORS cerca del lugar de operación del dron, la estación móvil DJI D-RTK 2 es una buena opción para obtener datos de la estación base para el procesamiento PPK. Para utilizarla, basta con configurar la estación base sobre un punto conocido bajo coordenadas WGS84 y altura elipsoidal en metros. A continuación, desplace la ubicación de la estación base basándose en las coordenadas 3D del punto conocido en la aplicación Pilot 2.
Asegúrese de configurar primero la D-RTK 2 in situ, y espere unos minutos antes y después del vuelo para cubrir toda la duración del mismo. Asimismo, evite mover o inclinar la estación base D-RTK 2 durante el vuelo del dron, ya que podría interrumpir la grabación de datos debido a los cambios de orientación. Una vez finalizado el vuelo, conecta la estación base a un ordenador mediante un cable USB-C y exporta los archivos RTCM (Radio Technical Commission for Maritime) en formato .dat grabados tras el vuelo. Al utilizar la estación móvil DJI D-RTK 2, puedes evitar la necesidad de equipos adicionales y tarifas de suscripción que pueden ser necesarias para la comunicación en tiempo real. Esto hace que el proceso PPK sea más rentable y ofrece una mayor flexibilidad para la recopilación de datos, especialmente en áreas con cobertura celular limitada o inexistente.
Alineación de datos y tratamiento de PPK
Esta sección proporciona un proceso paso a paso para aplicar datos de drones con archivos GNSS rover recogidos de NGS CORS, Estaciones Base de terceros o la Estación Móvil DJI D-RTK 2 para iniciar el proceso PPK. Utilizaremos RedCatch REDToolBox como ejemplo:
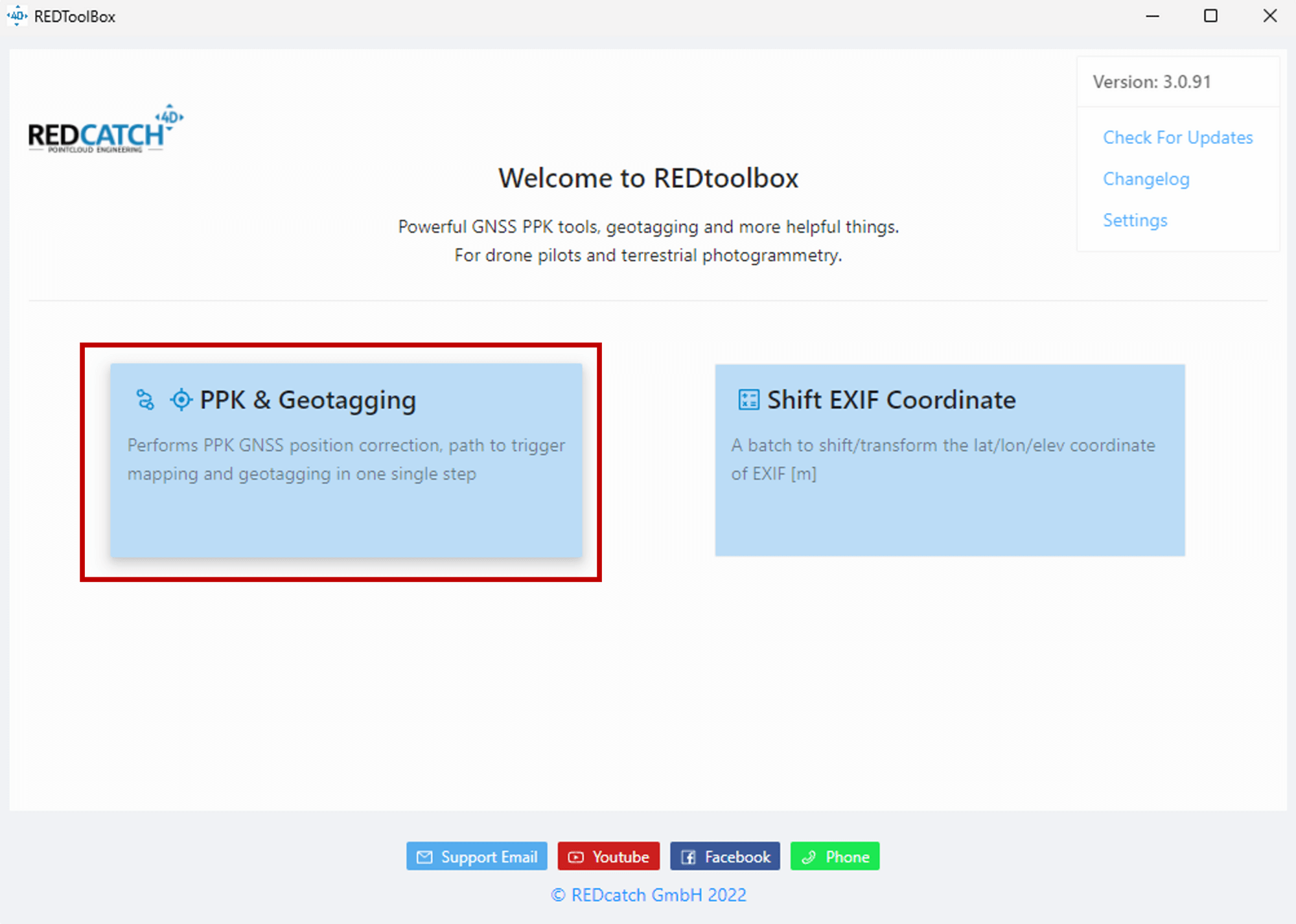
1. Para empezar, tendrá que abrir RedCatch REDToolBox y seleccionar la opción "PPK & Geotagging".
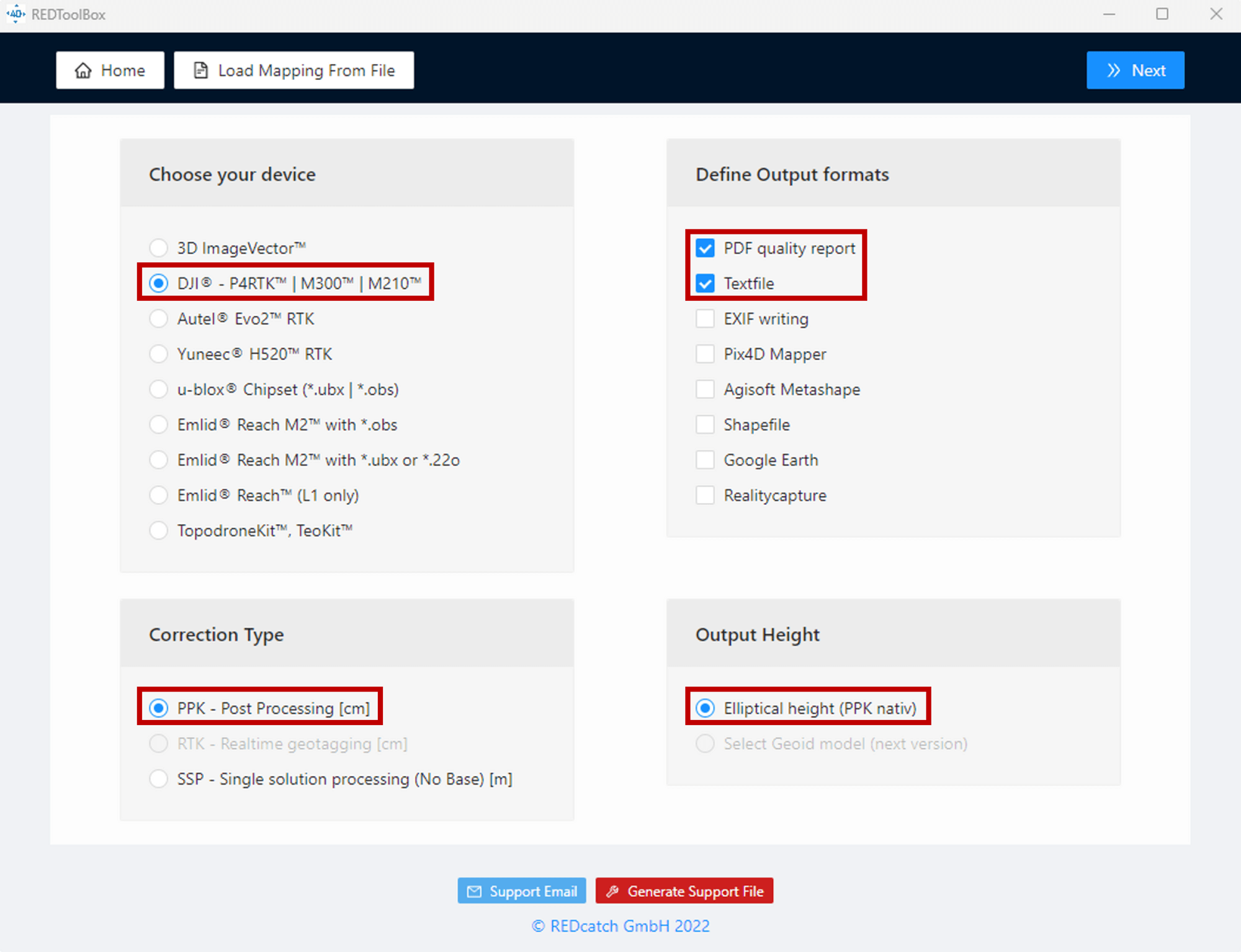
2. La opción le pedirá que elija DJI como opción de dispositivo y seleccione Informe de calidad PDF y Archivo de texto como formatos de salida. A continuación, seleccione la opción PPK como tipo de corrección y Altura elíptica (PPK nativa) como altura de salida. Después de estas selecciones, haga clic en "Siguiente".
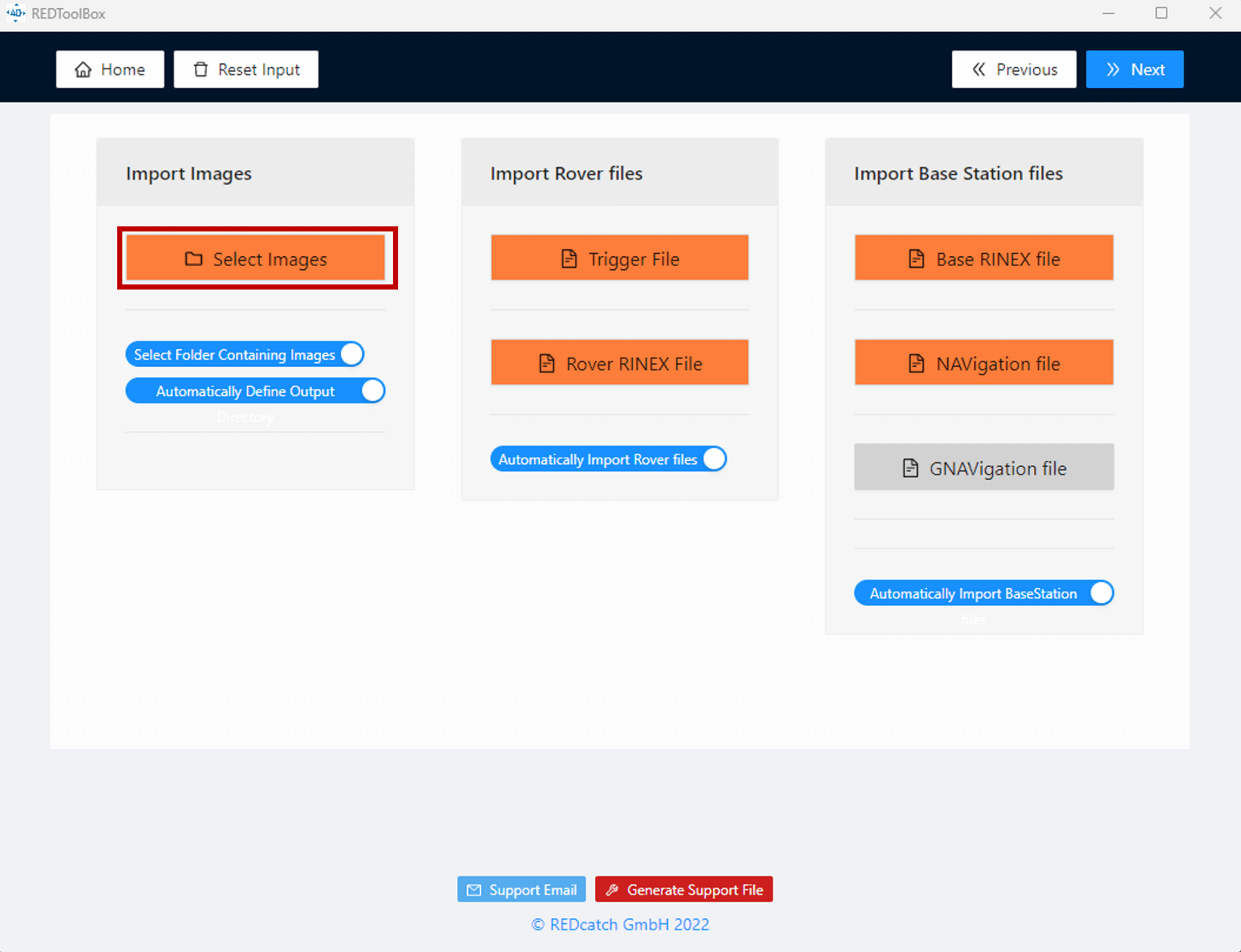
3. Para importar imágenes, vaya a la sección "Importar imágenes" y seleccione "Seleccionar imágenes" para definir el directorio de las imágenes sin procesar. Esto garantizará que las imágenes se importen correctamente y puedan utilizarse en el proceso PPK.
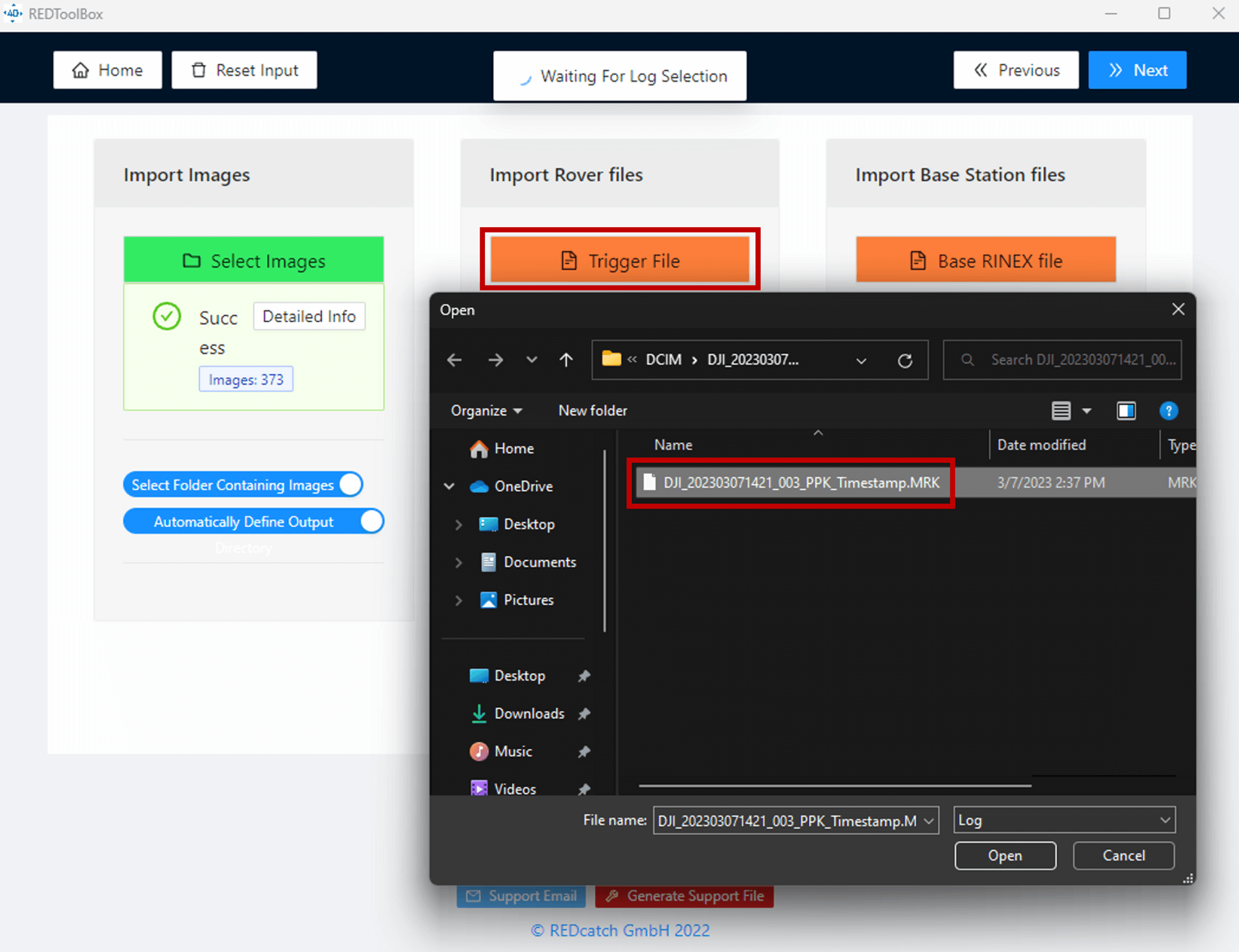
4. A continuación, tendrás que seleccionar la sección "Importar archivos Rover" y elegir la opción "Archivo Trigger". Aquí, puedes importar el archivo MRK con el nombre "XXX_Timestamp.MRK" bajo la carpeta de imágenes RAW. Este archivo proporcionará información importante sobre las marcas de tiempo de la imagen que se utilizarán en el proceso PPK.
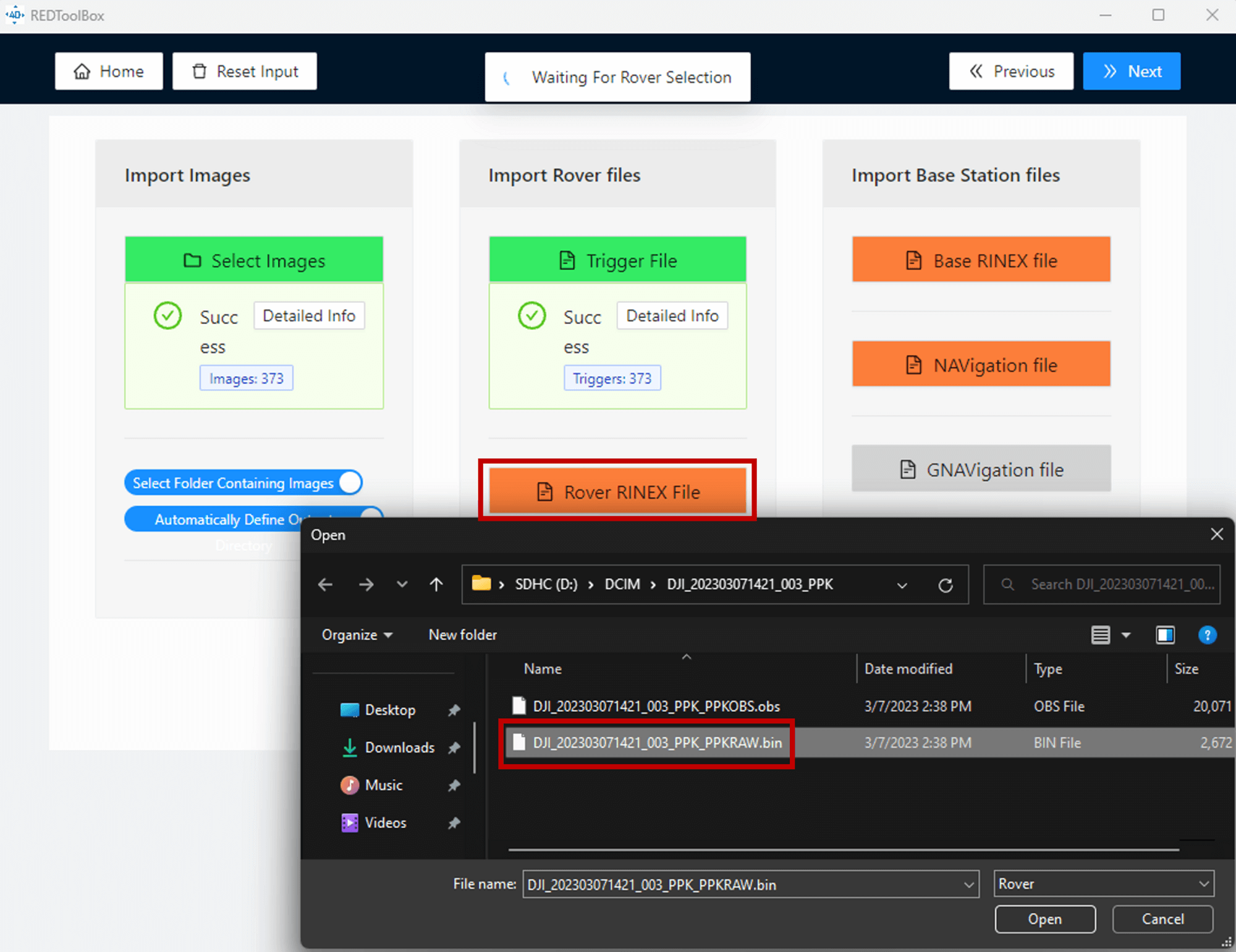
5. Tras importar el archivo MRK, tendrás que seleccionar de nuevo la opción "Rover RINEX file" e importar el archivo RINEX con el nombre "XXX_PPKRAW.bin" en la carpeta de imágenes RAW. Asegúrate de seleccionar el archivo correcto, ya que esto será fundamental para el éxito del proceso PPK.
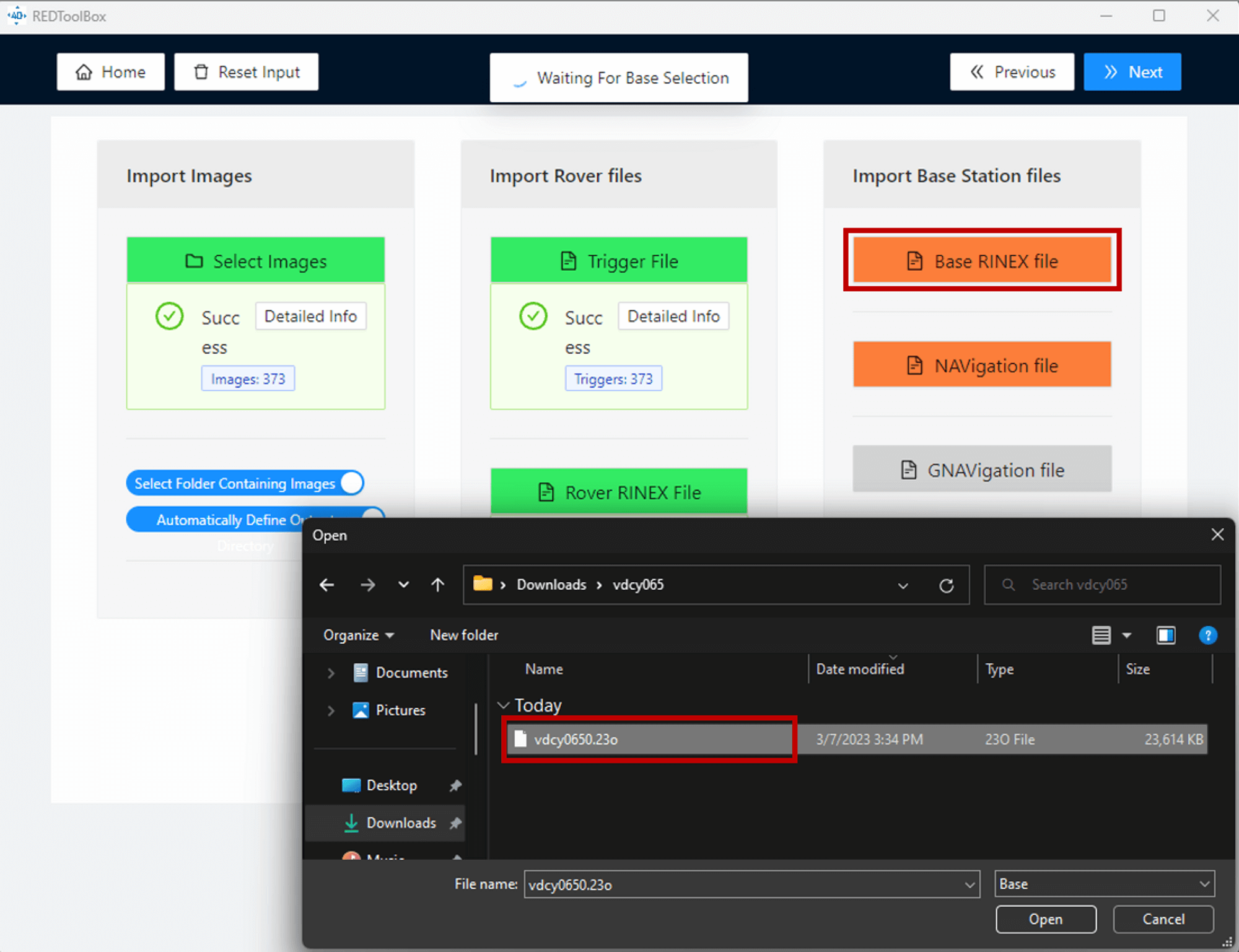
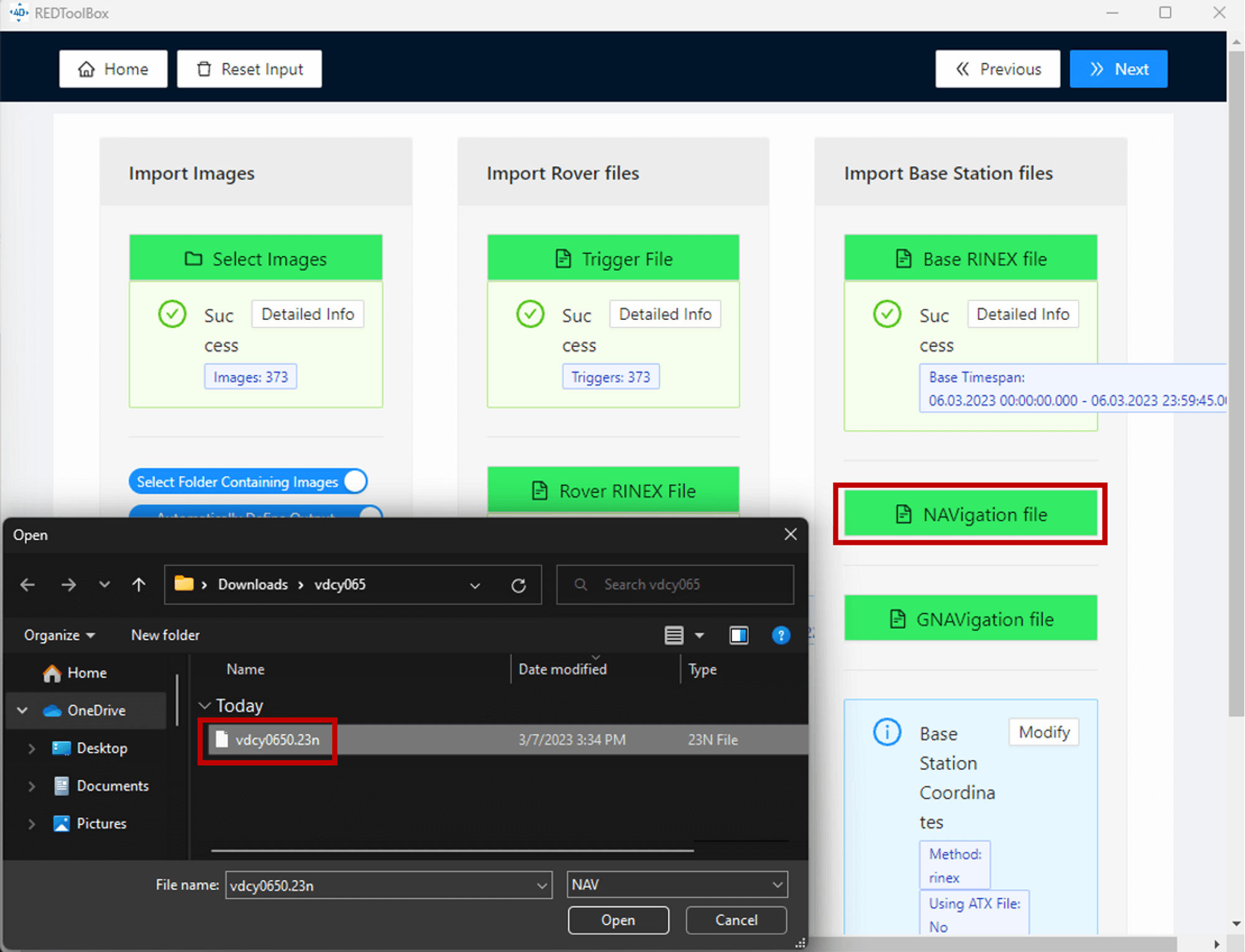
6. Pasando a la sección "Importar archivos de la estación base", selecciona la opción "Archivo RINEX base" e importa el archivo RINEX llamado "XXX.xxo" de la carpeta de datos de satélite sin procesar descargada del sitio de UFCORS. Si estás utilizando la estación móvil DJI D-RTK 2 para el procesamiento PPK, selecciona e importa el archivo RTCM con formato .dat en esta opción. Si necesita fusionar múltiples archivos .dat RTCM en un único archivo, utilice la siguiente herramienta y ejecútela en el mismo directorio que los múltiples archivos RTCM: merge_bin.bat
7. Una vez que haya seleccionado el archivo XXX.xxo de la carpeta de datos de satélite sin procesar, los archivos de navegación y gnebigation deberían importarse automáticamente. Si no lo hacen, estos dos archivos se pueden encontrar dentro de la carpeta de datos de satélite en bruto descargado desde el sitio UFCORS.
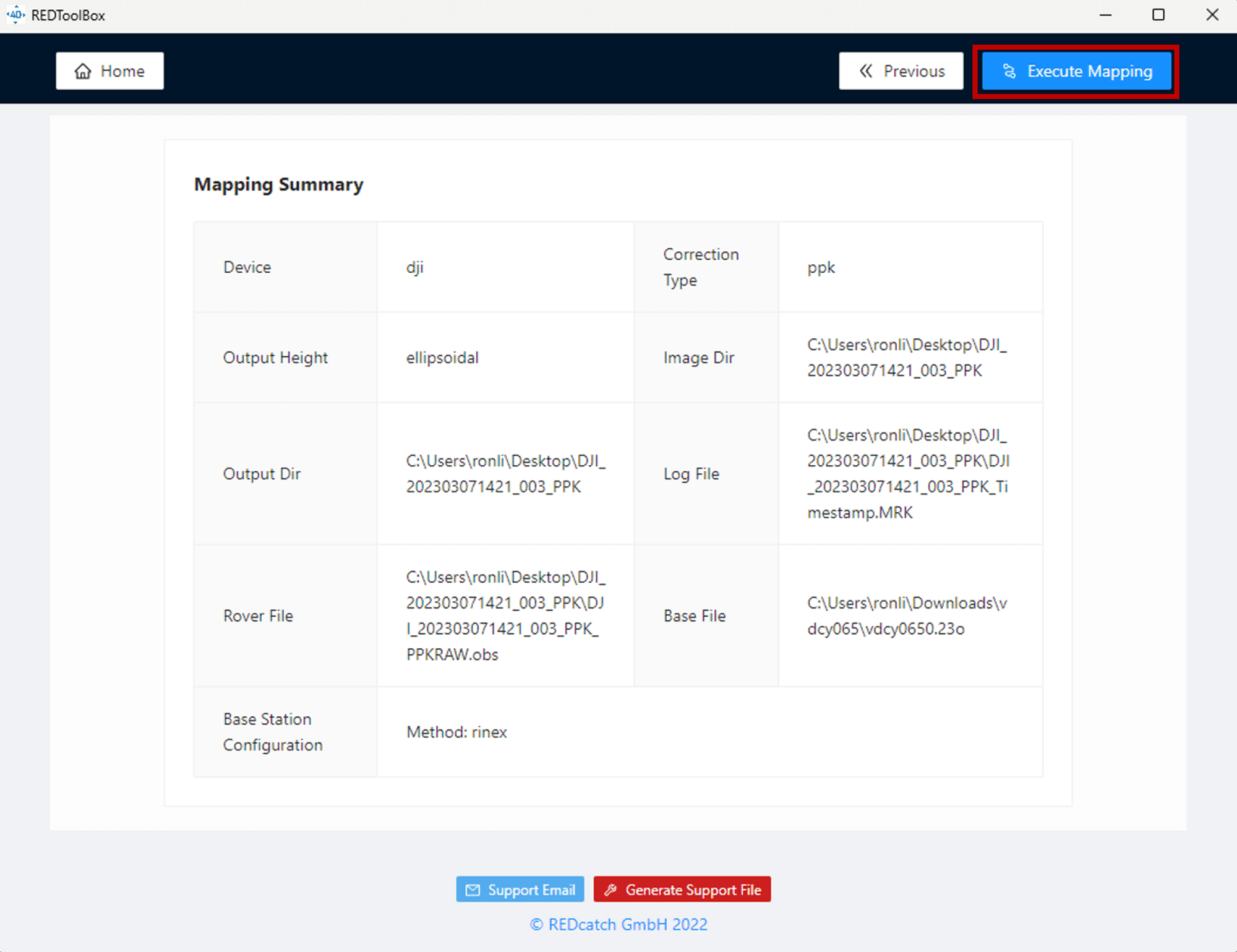
8. Por último, revise el resumen de la asignación y seleccione "Ejecutar asignación" para iniciar el proceso PPK.
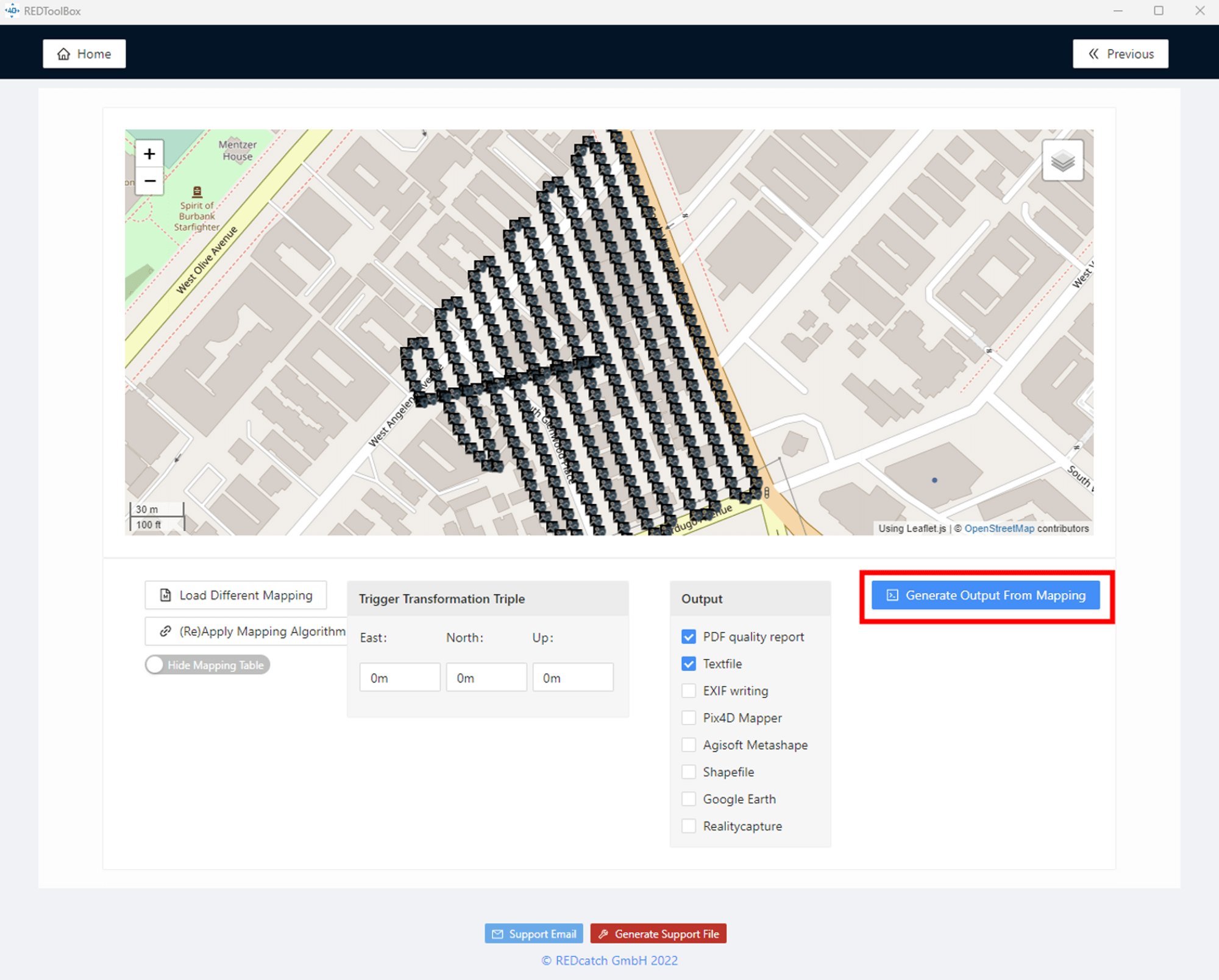
9. Una vez finalizado el proceso, marque "Informe de calidad en PDF" y "Archivo de texto" y, a continuación, seleccione la opción "Generar salida a partir del mapeo".
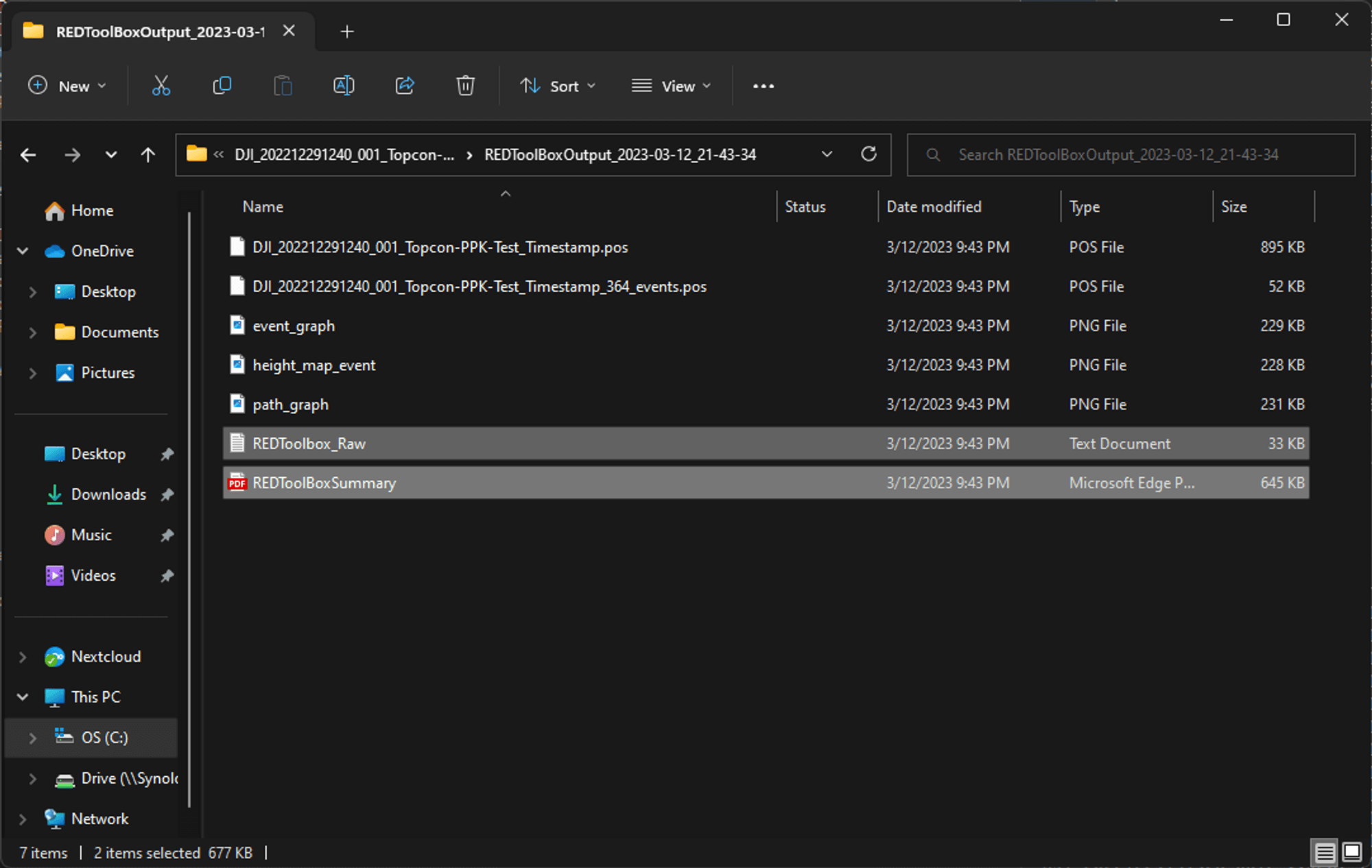
10. Para asegurarse de que se exportan tanto los datos POS corregidos (REDToolbox_Raw.txt) como el informe de resumen (REDToolBoxSummary.pdf), abra la carpeta de salida. Más tarde, utilizaremos el primer archivo de marca de tiempo con los datos POS de imagen corregidos para el procesamiento fotogramétrico.
Sobrescritura de datos de posición y orientación (POS).
Los datos POS (posición y orientación) de imágenes de drones se refieren a la información sobre la ubicación, actitud y trayectoria de un dron al capturar imágenes. Estos datos se obtienen normalmente mediante GPS y otros sensores a bordo del dron y se utilizan para georreferenciar con precisión las imágenes y crear un modelo 3D o un mapa de la zona estudiada mediante técnicas de fotogrametría.
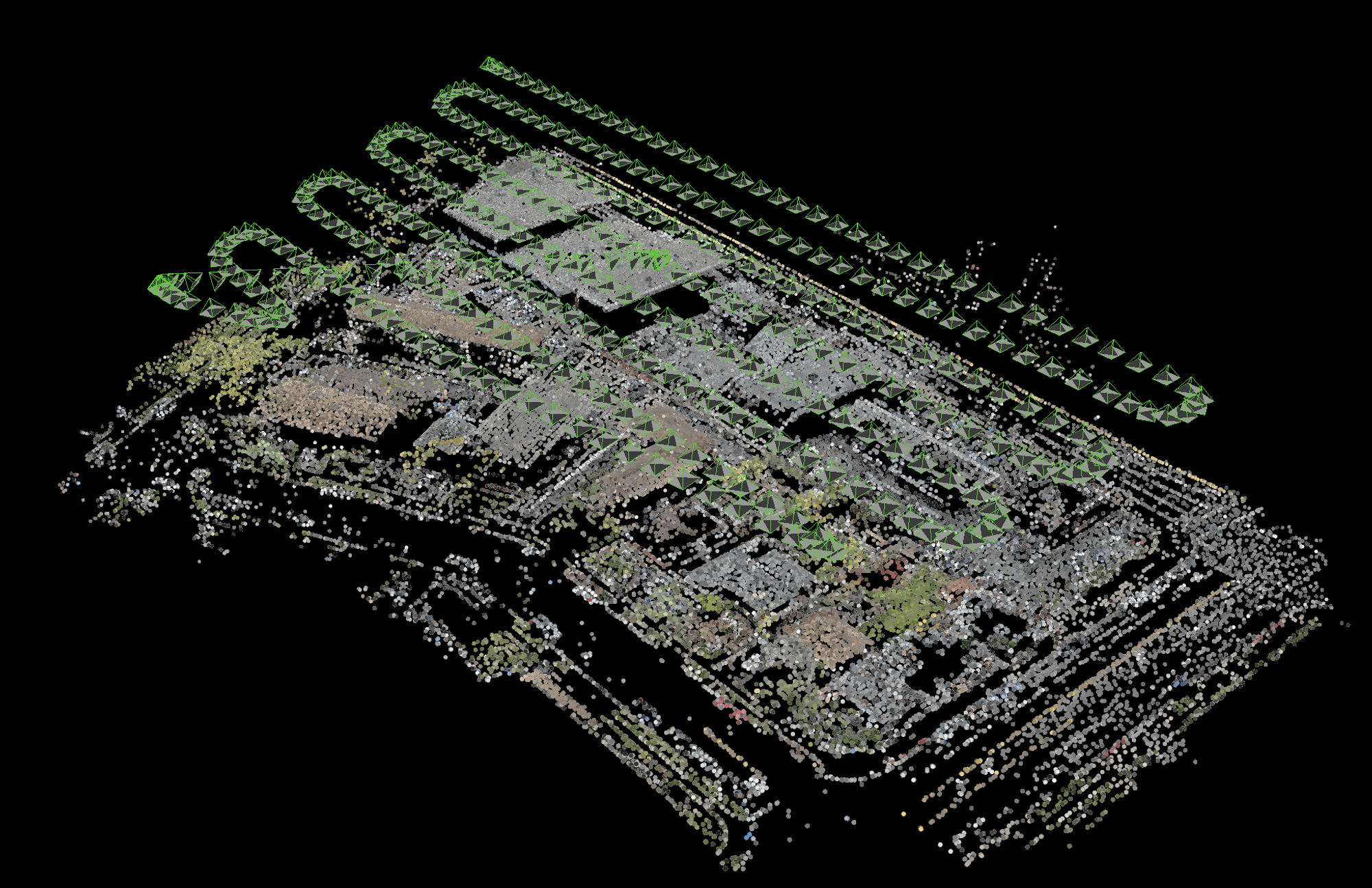
En el proceso de fotogrametría, los datos POS de la imagen del dron se utilizan en el proceso de aerotriangulación para determinar con precisión la posición y orientación de cada imagen en el espacio 3D. El proceso de aerotriangulación consiste en calcular las posiciones y orientaciones relativas de las imágenes basándose en sus solapamientos y en las características de imagen correspondientes. Los datos POS de la imagen del dron se utilizan para calcular la orientación de cada imagen en el espacio 3D, y esta información se utiliza para generar una nube de puntos dispersa que representa el área estudiada.
Modelo de aerotriangulación generado a partir de la imagen POS
Si los datos POS de la imagen del dron son inexactos o imprecisos, el resultado del proceso de fotogrametría también será menos preciso. Cualquier error en los datos POS de la imagen del dron puede conducir a errores en el proceso de aerotriangulación, lo que causará errores en el proceso de ajuste del haz y, en última instancia, dará lugar a un resultado menos preciso.
La precisión de los datos POS de la imagen del dron influye en la precisión global del resultado durante el proceso PPK. El proceso PPK corrige los datos POS de la imagen del dron de cualquier error causado por la deriva o el ruido del GPS y otros errores relacionados con el sensor. Los datos POS corregidos por PPK resultantes se utilizan para generar una nube de puntos densa que representa el área estudiada, que puede utilizarse para crear modelos 3D o mapas. Por lo tanto, es importante asegurarse de que los datos POS de la imagen del dron están correctamente definidos en el software del proceso fotogramétrico.
Utilizaremos el software DJI Terra como ejemplo para aplicar y sobrescribir los datos POS de la imagen. Siga los pasos que se indican a continuación para aplicar y sobrescribir datos POS de imagen corregidos por PPK en el software Terra:
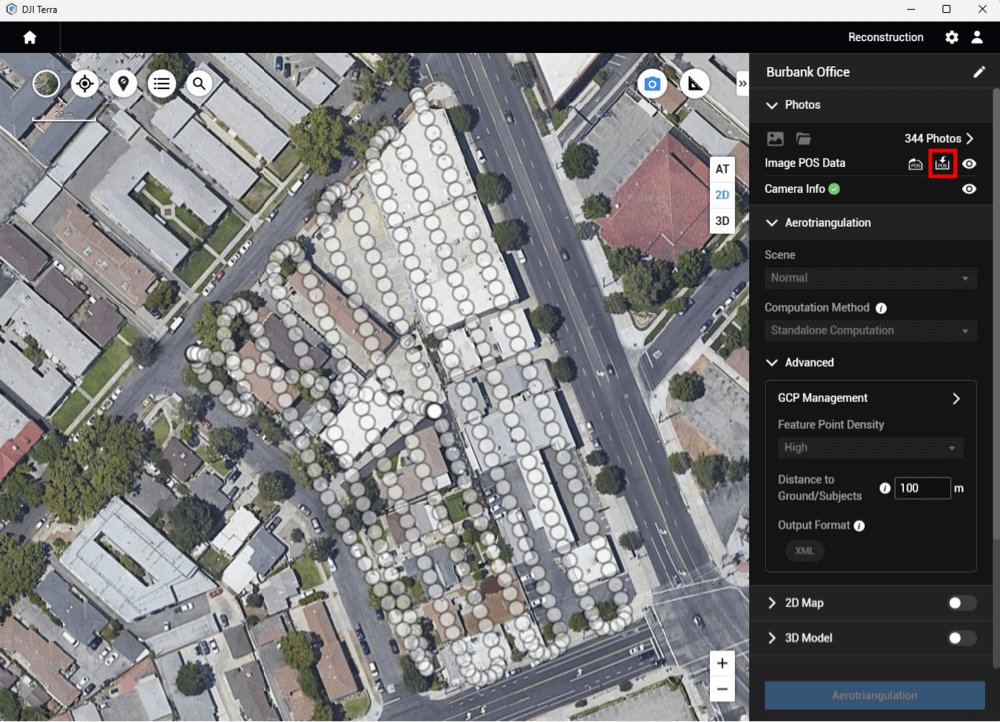
1. Abra el software DJI Terra, en la pestaña "Reconstrucción" seleccione "Nueva Misión" y luego seleccione "Luz Visible" para crear una nueva misión de reconstrucción de fotogrametría. Después de importar todas las fotos, seleccione la opción del icono "Import POS Data" como se muestra a continuación.
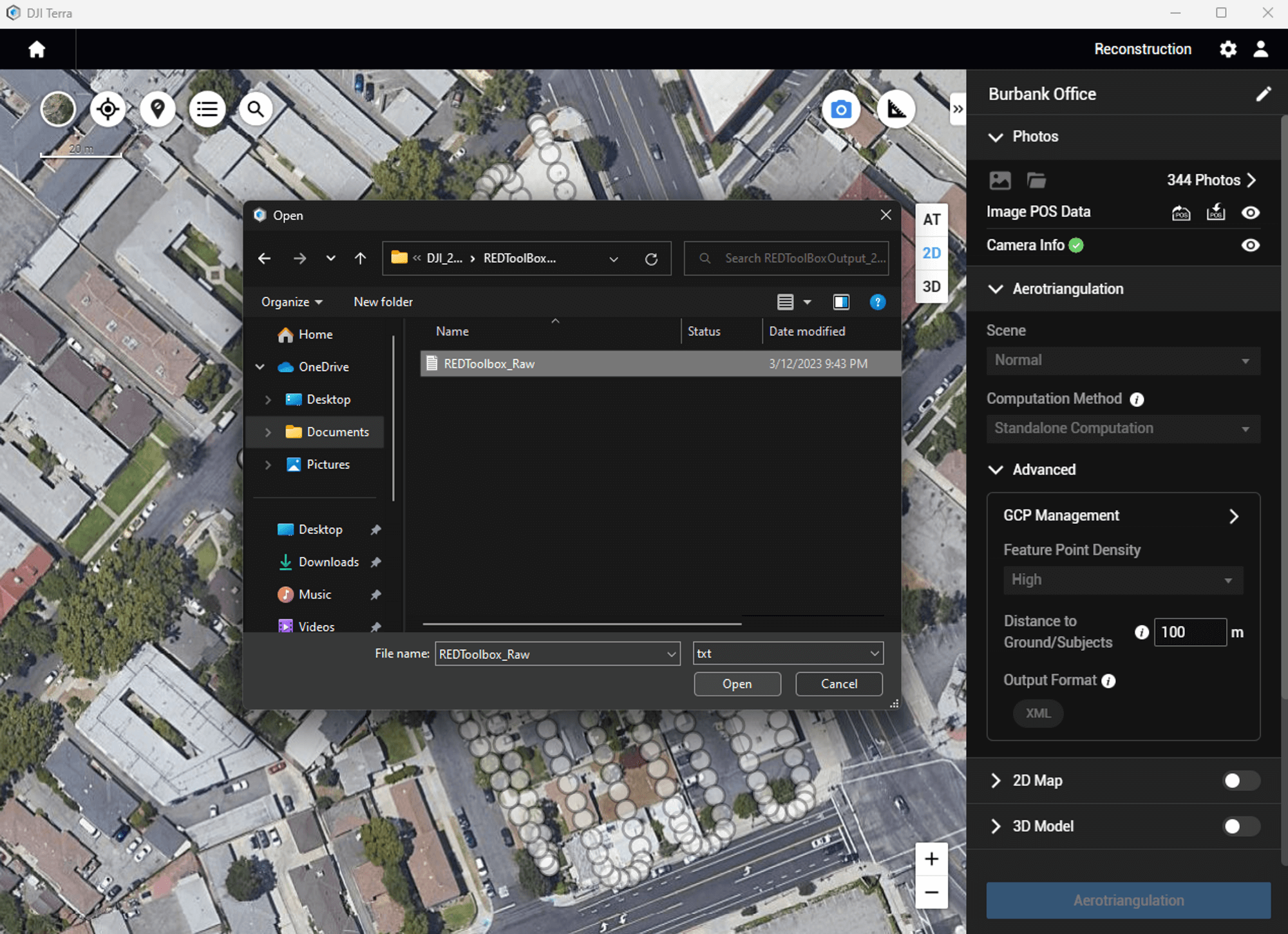
2. Asegúrese de importar el archivo POS procesado en formato de texto de la última sección.
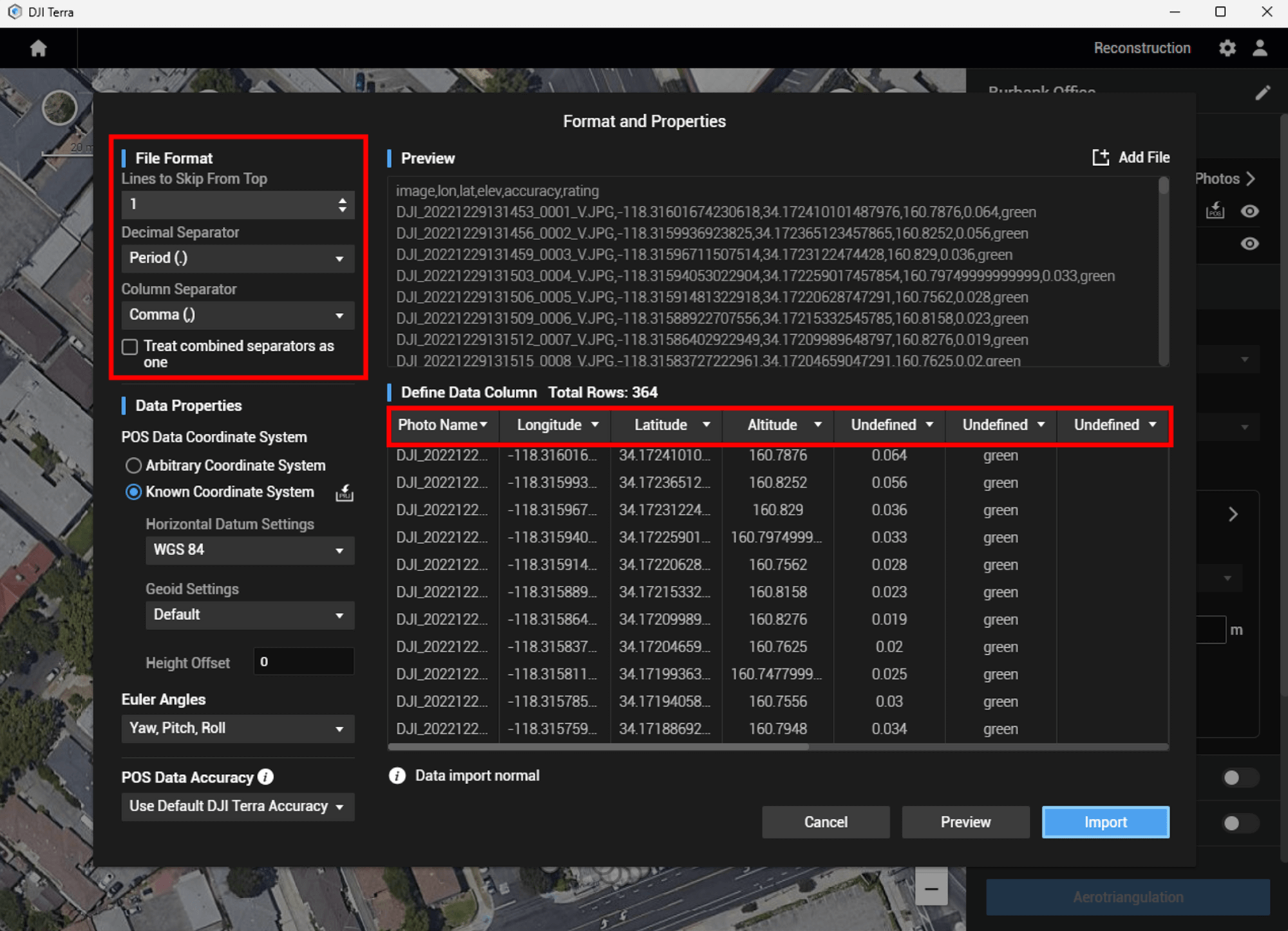
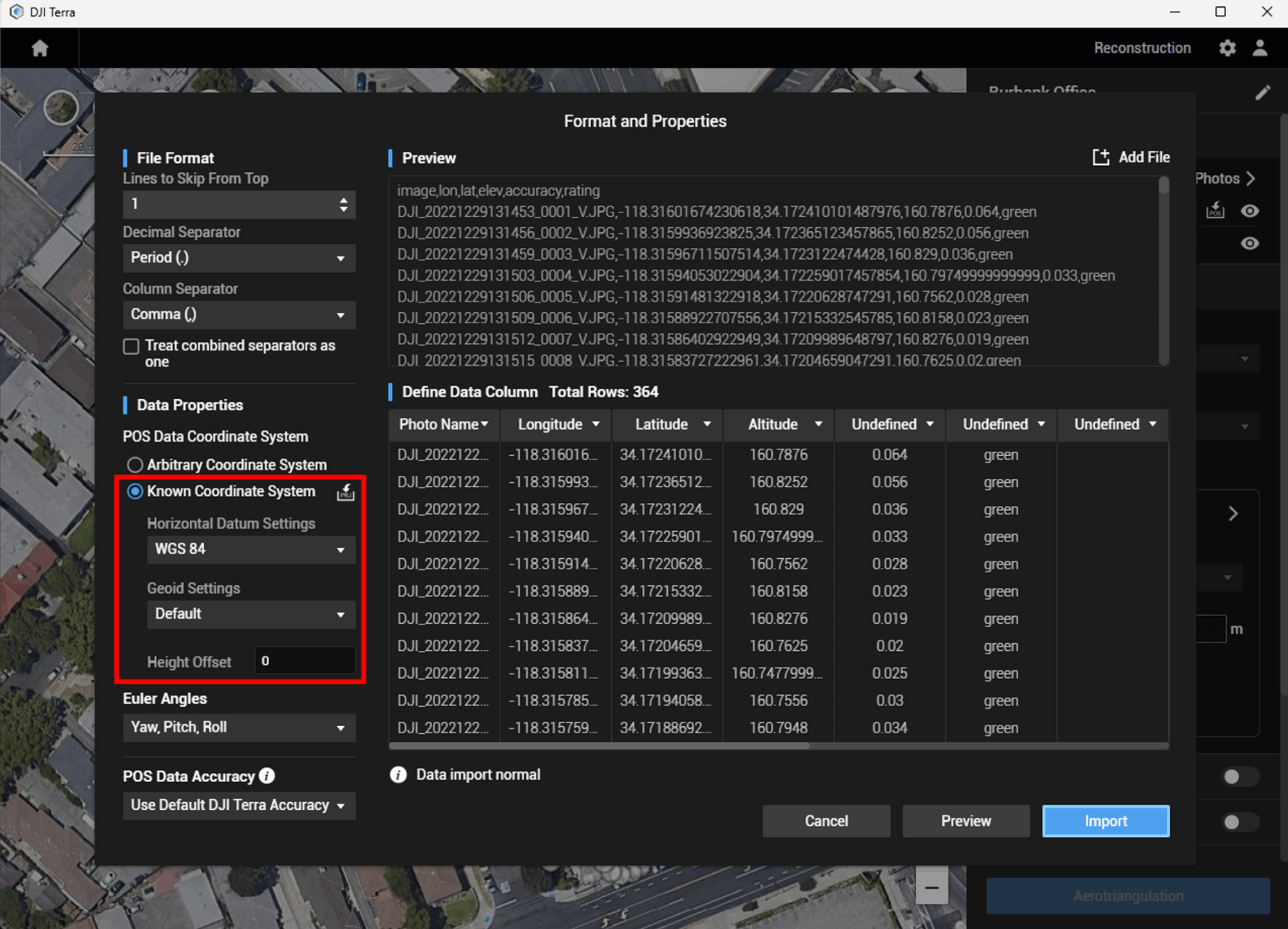
3. Tras importar los datos del TPV de la imagen, debería aparecer automáticamente una ventana de "Formato y propiedades". En esta ventana, ajuste la columna de datos y defina las propiedades de la columna en la sección "Definir columna de datos". Asegúrese de que la primera fila de la tabla contiene los datos de TPV de la primera imagen, y utilice las herramientas de la sección "Formato de archivo" para definir los separadores de datos y la primera línea de los datos.
4. Para proceder, seleccione la opción "Sistema de coordenadas conocido" en el sistema de coordenadas de los datos de TPV. A continuación, seleccione las coordenadas horizontales y verticales correspondientes para los datos POS de la imagen procesada por PPK importada. Es crucial seleccionar las coordenadas correctas tanto para el sistema horizontal como para el vertical para evitar cualquier desplazamiento en la salida. Si no está seguro de qué sistema de coordenadas elegir, puede encontrar el sistema de coordenadas de los datos de TPV procesados por PPK en la configuración del software PPK o en el informe de calidad del proceso de datos PPK. Normalmente, el sistema horizontal debe estar en WGS84 (EPSG:4326), y el sistema vertical debe estar en Altura elipsoidal (en metros, que puede establecerse en Predeterminado en DJI Terra). Una vez que haya terminado de definir los nuevos datos POS, seleccione "Importar".
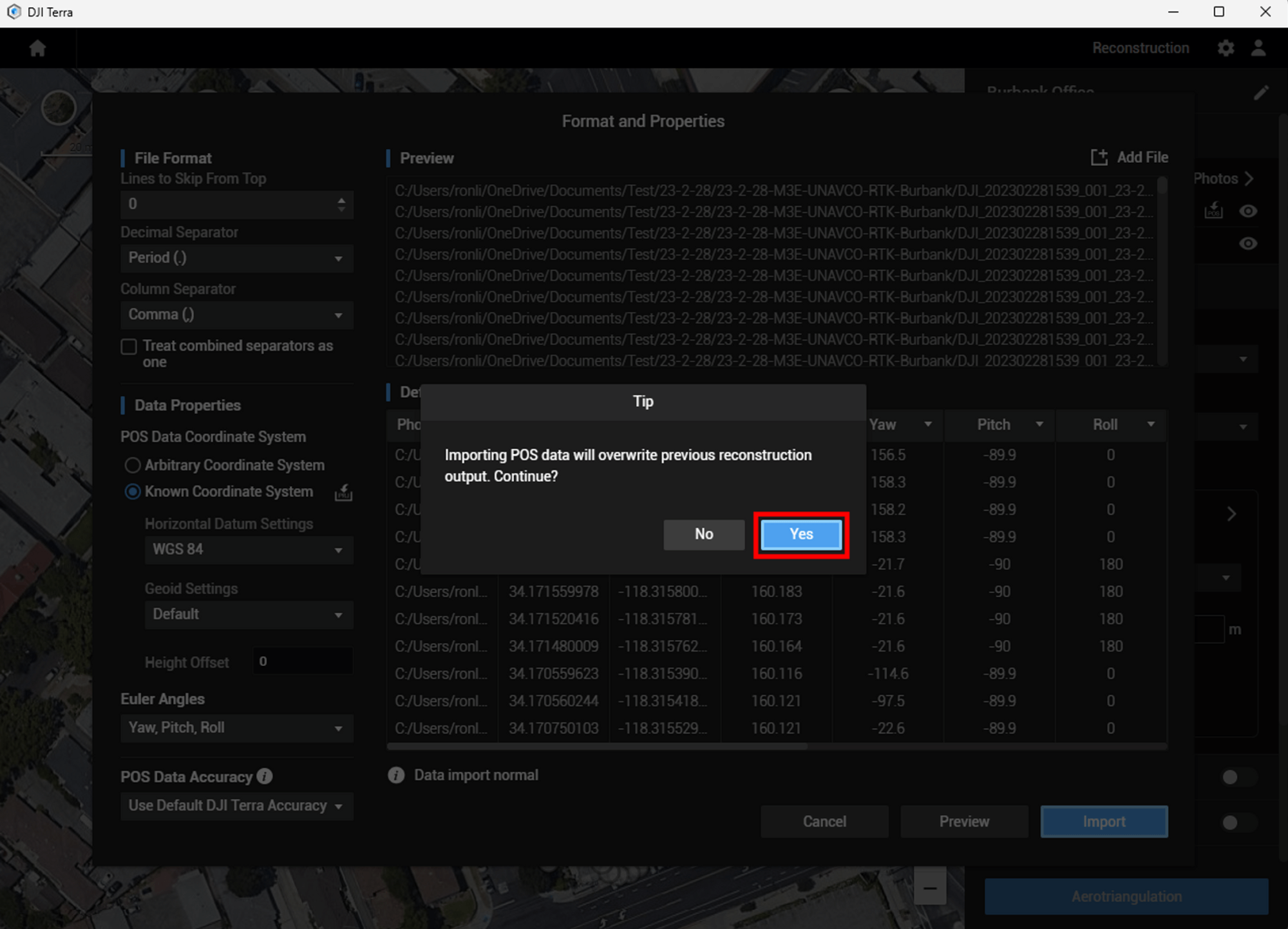
5. Para reemplazar los datos POS de la imagen antigua incrustados en las fotos con los datos POS corregidos por PPK del archivo txt, selecciona "Sí" para confirmar la acción en DJI Terra. Los datos POS se han sobrescrito correctamente.
PPK ofrece una solución eficaz y precisa para obtener datos geoespaciales de gran exactitud para diversas aplicaciones. Al aprovechar tanto el GPS como las técnicas de posprocesamiento, PPK permite obtener resultados de precisión centimétrica, incluso en entornos difíciles. Siguiendo el flujo de trabajo PPK anterior y utilizando herramientas avanzadas de software y hardware, puede asegurarse de que está logrando el máximo nivel de exactitud y precisión en sus datos, lo que en última instancia conduce a una mejor toma de decisiones y mejores resultados.
Pack básico DJI Mavic 3E + Care Refresh 2 años
ENTREGA BAJO PEDIDO
Más información: industrial@djiarsmadrid.com
Incluye Care Enterprise Basic de 2 años
Para más información, contacte con: industrial@djiarsmadrid.com
Pack básico DJI Mavic 3T + Care Refresh 2 años
ENTEGA SOLO BAJO PEDIDO
Más información: industrial@djiarsmadrid.com
Incluye Care Enterprise Basic de 2 años
Para más información, contacte con: industrial@djiarsmadrid.com
El Zenmuse L1 integra un módulo Livox Lidar, una IMU de alta precisión y una cámara con un CMOS de 1 pulgada en un gimbal estabilizado de 3 ejes. Cuando se utiliza con Matrice 300 RTK y DJI Terra, el L1 forma una solución completa que le brinda datos 3D en tiempo real durante todo el día, capturando de manera eficiente los detalles de estructuras...
DISPONIBLE PARA ENTREGA INMEDIATACONTACTE CON: industrial@djiarsmadrid.com
Sensor full frame de 45 MP.
Cubre 7,5 km2 en un solo día de trabajo.
Captura Oblicua Inteligente para tomar fotos en los diferentes ángulos necesarios.
Puede tomar una foto cada 0,7 s, abarcando 3 km2 en un solo vuelo.
Captura datos con precisión de centímetros.
Puede equiparse...
Esta página web utiliza cookies para analizar de forma anónima y estadística el uso que haces de la web, mejorar los contenidos y tu experiencia de navegación. Para más información accede a la Política de Cookies














Comments (0)