Your cart
There are no more items in your cart






Zenmuse L1
ZENMUSE L1
* Out-of-Stock , check the preorder availability of this product with sales dep.
€9,109.00
Tax included
STOCK AVAILABLE - NOT AVAILABLE FOR ONLINE SALE
CONTACT WITH: shop@stockrc.com
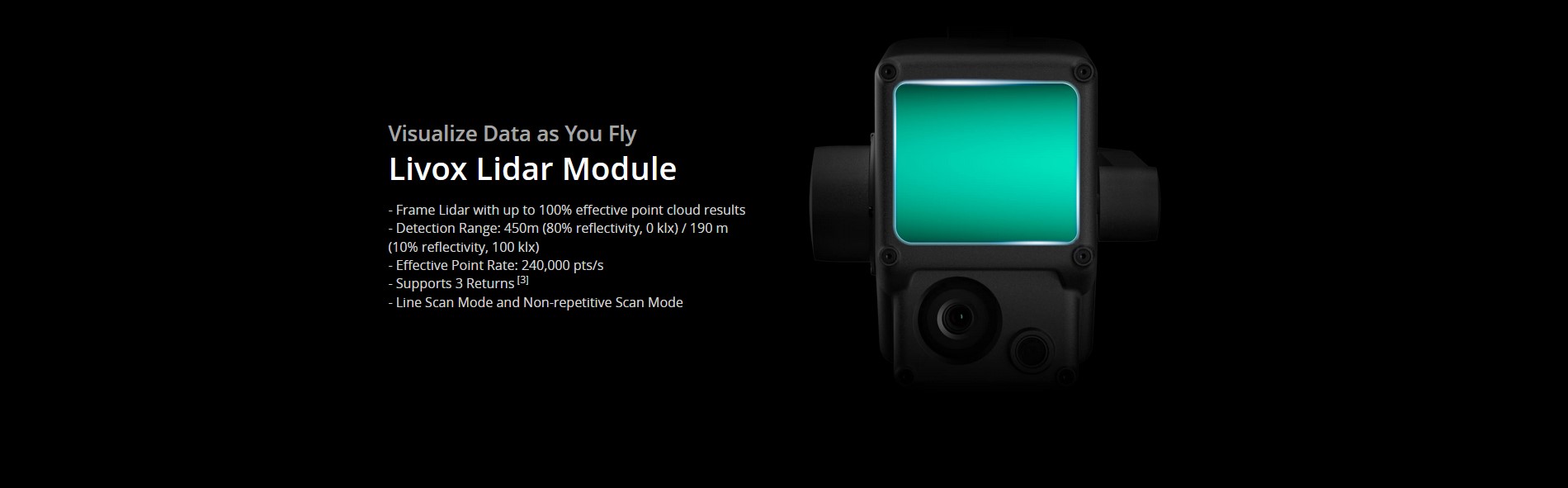
The Zenmuse L1 integrates a Livox Lidar module, a high-precision IMU and a 1-inch CMOS camera into a stabilised 3-axis gimbal. When used with Matrice 300 RTK and DJI Terra, the L1 forms a complete solution that gives you real-time 3D data around the clock, efficiently capturing the details of complex structures and delivering highly accurate reconstructed models.
*dron not included
INCLUDES 6 MONTHS DJI TERRA ELECTRICITY LICENCE








{kind=link}
{kind=link}
Tap to zoom
